The Servo Trigger comes with a couple of response modes that should be
useful for most servo control needs, but in the case they’re not a good fit,
they can be modified.
There are several other modes hidden in the source file. In addition to the
two default modes, there are three other modes. You can select among
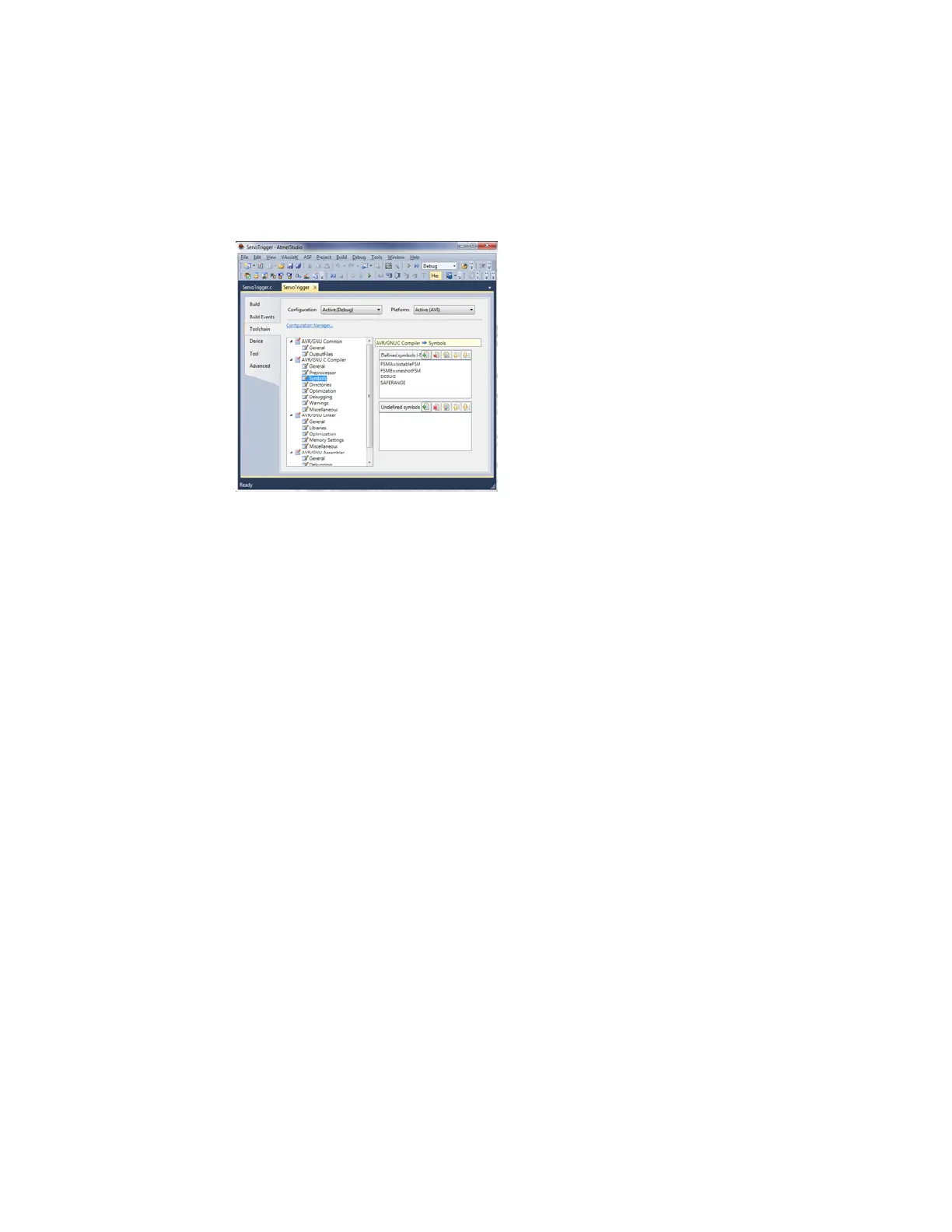
these by changing the compile-time symbols in the project. In Atmel Studio,
select the “Servo Trigger” tab, then navigate to “Toolchain-> AVR/GNU C
Compiler->Symbols” item.
If you’re using the command-line tools, the symbol definitions are found in
the compiler invocation in the Makefile.
The
FSMA and FSMB symbols determine which modes are programmed on
the Servo Trigger. FSMA defines the unjumpered (default) mode, and
FSMB defines the jumpered mode. There are five modes currently defined
in the source file.
1.
bistableFSM - The default mode - when the input is asserted, it
moves from position A to B. While input is held, it will stay at B. When
released, it moves back to A.
2.
oneshotFSM - Does a complete cycle every time the input is asserted
- from A to B, then back to A.
3.
ctpFSM - A customization of the oneshotFSM for interactive artist
Christopher T Palmer, which allows the B-to-A return cycle to be
interrupted by a fresh input actuation.
4.
togglingFSM - Each time the input is asserted, it changes from A to
B, or B to A. This mode is especially useful for driving continous
rotation servos.
5.
astableFSM - When the input is asserted, it cycles back and forth
between A and B. When the input is inactive, it sits where it was.
You can put any mode in either slot, or even put the same mode in both.
Implementation Details
As you may have guessed from the names, the modes are implemented
using Finite State Machines. Finite state machines are a design concept the
defines a set of states, and a corresponding set of rules that determine how
to transition between the states.
Within the Servo Trigger, each mode uses the same basic set of states,
which in turn describe how it drives the servo. The states are:
1. Sitting at position A.
2. Moving from A to B.
3. Sitting in position B.
4. Moving from B to A.
Page 1
of 1
 Loading...
Loading...