55
OLEDindicadordepilhapiscacada4segundosparaavisarqueolaserseencontranomododestandby
econtinualigado.
Premiremanterpremidadurante3segundosateclamanualdocontroloadistânciaparadesactivaromodo
destandbyereporaoperabilidadeintegraldolaser.Ofeixedelaseretodasasoutrasfunçõessãoactivadas
novamente.
Operação manual
Comoauxílionodocontroloàdistância,respect.,dacombinaçãoreceptor-comandoàdistância,oaparelho
poderá ser comutado,premindo-seuma vez, brevemente, atecla manualda operaçãoautomática de
autonivelaçãoemoperaçãomanual,oqueésinalizadopeloLEDvermelho5quecaintermitenteemciclos
desegundo. Neste modo operacional,o eixoY poderáser inclinado, premindo-se asteclas direccionais
„Paracima/Parabaixo“nocomandoàdistânciae,adicionalmente,oeixoXdolaser,premindo-seasteclas
direccionais„Àdireita/Àesquerda“nocontroloàdistância.
Nomodovertical(Operaçãomanual)asteclasdireccionais„Paracima/Parabaixo“ajustamofeixedelaser
àdireita/esquerdanadirecçãodoeixo.Asteclasdireccionais„Àesquerda/Àdireita“ajustamainclinaçãodo
feixedelaser.
Premirnovamenteateclamanualparavoltarparaaoperaçãodeautonivelação.
Operação de inclinação sobre um eixo (eixos Y)
ParaactivarainclinaçãosobreoeixoY,bastapressionarobotão‚manual‘nocontroleremotoduasvezes,
pelaintermitênciadosLEDsverdeevermelho4/5emciclosdesegundo.Nestemodooperacional,oeixoY
poderáserinclinadocomoauxíliodasteclasdireccionais„Paracima/Parabaixo“nodocontroloàdistância,
enquantooeixoXcontinuaatrabalharemoperaçãohorizontalautomática(p.ex.quandodamontagemde
tectosourampasinclinadas,emdeclive).
Seoaparelhotrabalhacom600 min
-1
,étambémactivaasegurança deentrada,istoé,amontagemdo
aparelhocontinuaráasermonitorada.
Premindo-se denovo, brevemente, a teclamanual, o aparelho comuta de retorno para a operação de
autonivelaçãoautomática,oqueseráindicadopeloLEDvermelho4.
EXEMPLOS DE TRABALHOS
Construção de edifícios
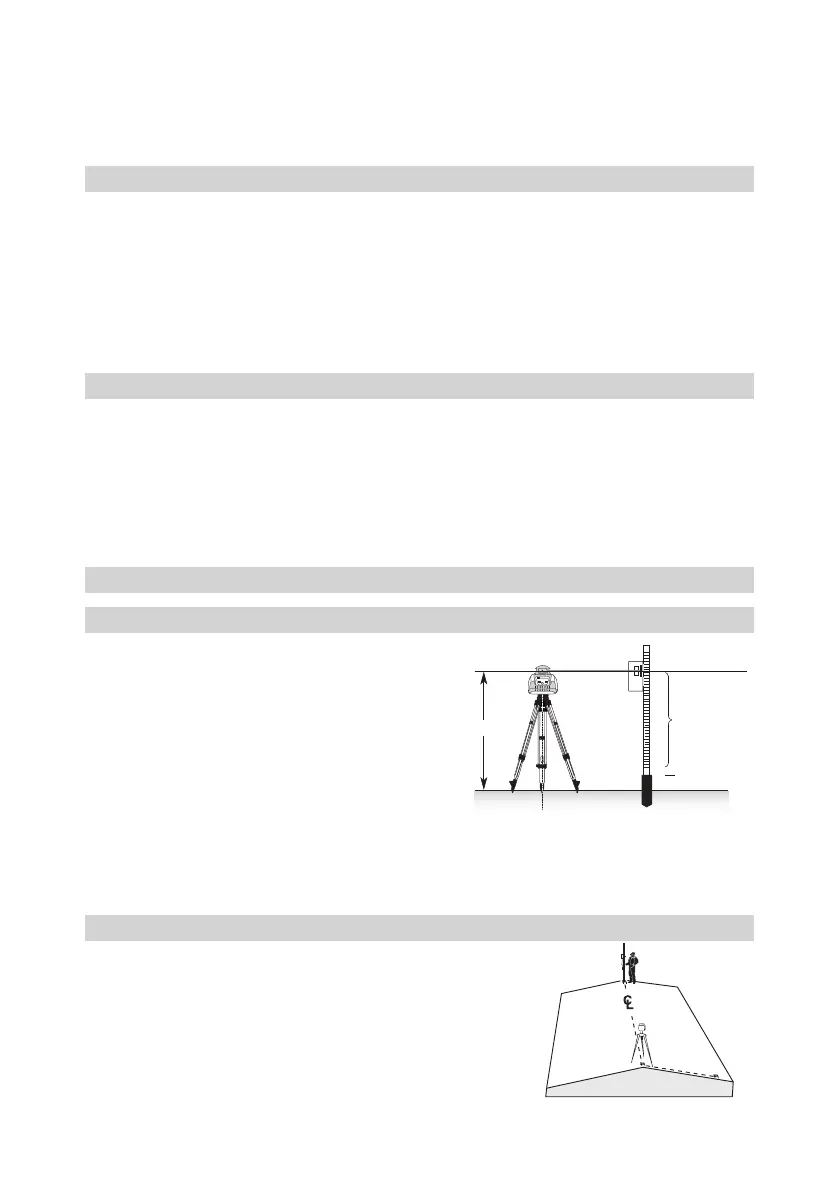
Determinação da altura do aparelho (AP)
Aalturadoaparelho(AP)éaalturadofeixedelaser.Elaé
determinadaatravésdaadiçãodaleituradaréguademedição
aumamarcaçãodealturaouaumaalturaconhecida.
Montagemdolasereposicionamentodaréguademedição
comoreceptoraumpinodealturaoudereferênciaconhecido
(NN).
Ajustaroreceptornaposição“naaltura”doraiolaser.
AdicionaraleituradaréguademediçãoàalturaNNconhecida,
paradeterminaraalturadolaser.
Exemplo:
AlturaNN =30,55m
Leituradarégua =+1,32m
Alturadolaser =31,87m
Utilizaraalturadolasercomoreferênciaparatodasasoutrasmediçõesdealtura.
Operação de inclinação sobre um eixo (Y)
1. Montarolasersobreopontodereferência(A).
2. Olharsobreacabeçadorotorparaajustarolasernaestacade
direcçãodesejadanoeixodeautonivelação.Rodarolasersobre
otripéatéqueestejacorrectamentedireccionado.
3. Fixar um receptor numa varade medição. Colocar a varade
mediçãosobreaestacadedirecçãodoeixoautonivelador,para
vericaraalturadolaser(B).
Nota:Utilizarestaalturadoaparelhocomoreferênciana
vericaçãodadirecçãodolaserdepoisdeterajustadoa
inclinaçãonooutroeixo.
1.32 m
30.55 m
HI
A
C
B