5-23
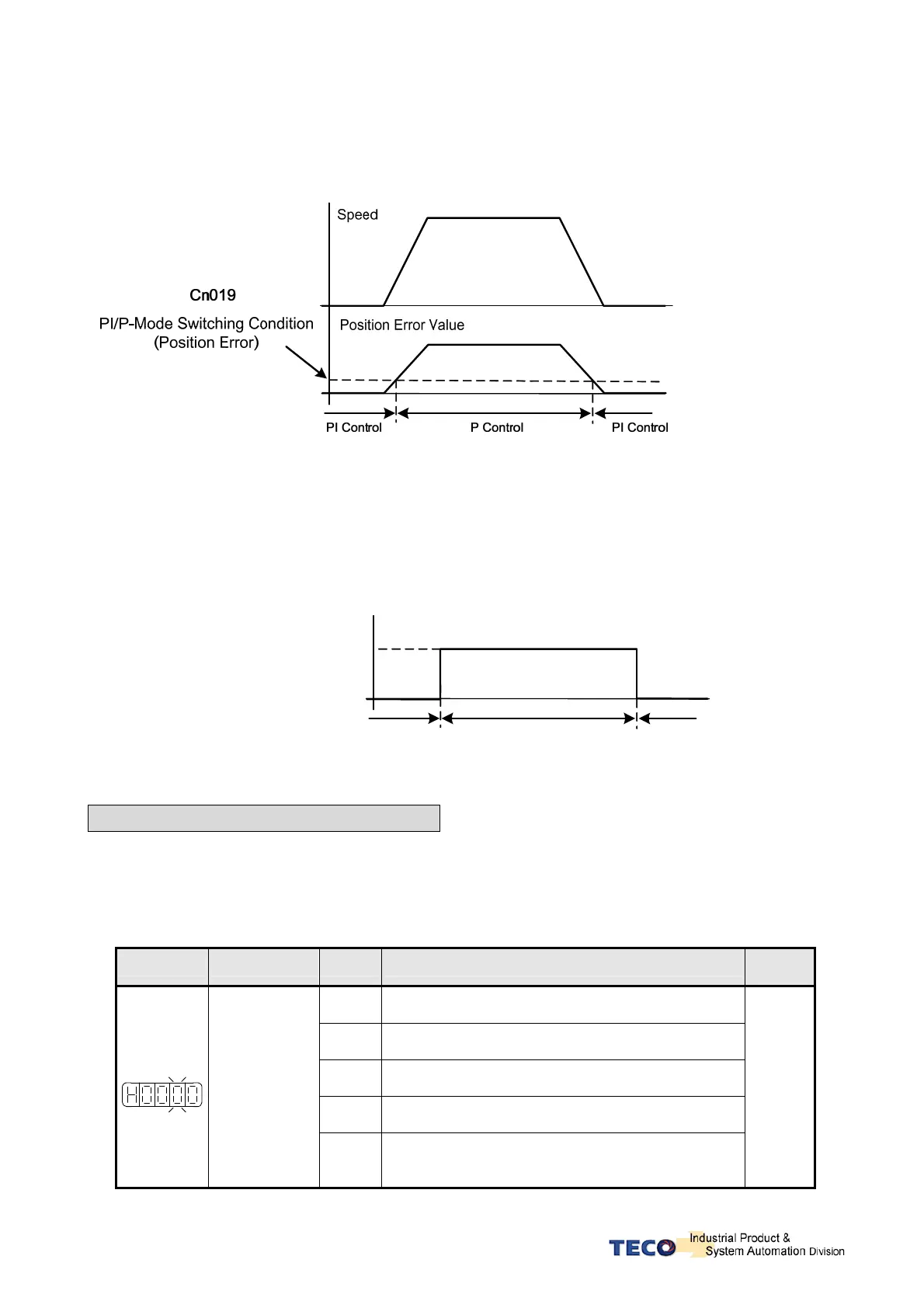
(4) PI to P mode switch over by comparing Position Error value.
When the Position Error value is less than Cn019 PI control is selected.
When the Position Error value is greater than Cn019 P control is selected.
As shown in diagram below:
(5) PI to P mode switch over by PCNT input contact.
When the PCNT input contact is open PI control is selected.
When the PCNT input contact is closed P control is selected.
Note: Input contacts status “1” (ON) and “0” (OFF).
Please check 5-6-1 to set the required high /Low signal levels (PNP/NPN) selection.
Switch PI/P
by PCNT input contact
P control
PI control
Enable
Status of contact PCNT
1
0
PI control
(B) Automatic gain 1& 2 switching
Selection of Automatic gain 1& 2 switch with different P&I Gains is possible by
setting Parameter Cn 015.1 to one of the selections listed in the table below.
Parameter Cn020 can be use for setting a switch delay time between different gains.
(Gain 1 and 2)
Parameter Name Setting Description
Control
Mode
0
Switch from gain 1 to 2 if torque command is greater
than Cn021.
1
Switch from gain 1 to 2 if speed command is greater
than Cn022.
2
Switch from gain 1 to 2 if acceleration command is
greater than Cn023.
3
Switch from gain 1to2 if position error value is
greater than Cn024.
Cn015.1
Automatic
gain 1& 2
switch
4
Switch from gain 1 to 2 by input contact G-SEL. Set
one of the multi function terminals to option 15 of
Hn501.
Pi/Pe/S