ue
control
PM
control
V/f
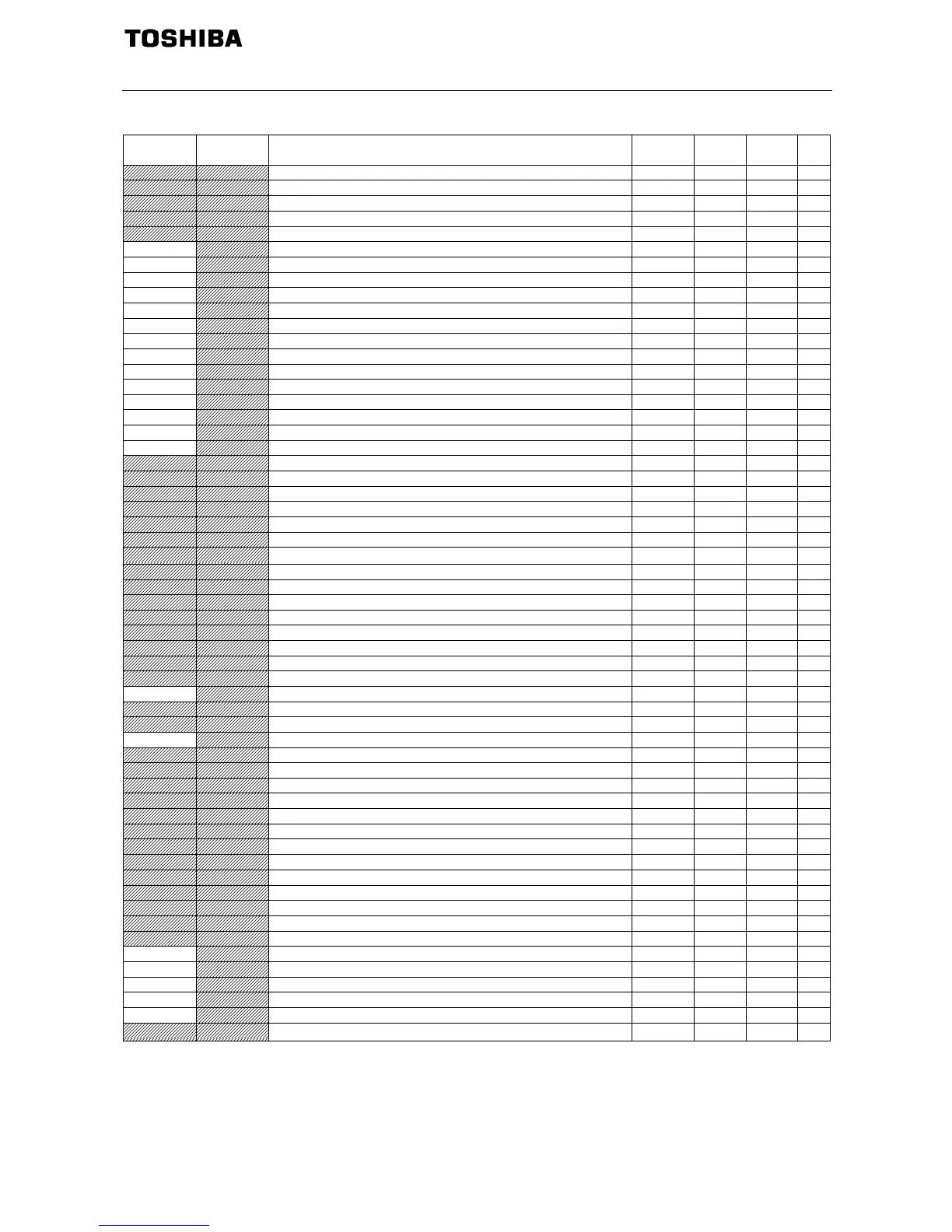
0 1 No function is assigned ●/● ●/● ● ●
2 3 F: Forward run command *4 ●/● ●/● ● ●
4 5 R: Reverse run command *4 ●/● ●/● ● ●
6 7 ST: Standby *1, 3, 4 ●/● ●/● ● ●
8 9 RES: Reset *2, 4 ●/● ●/● ● ●
10 11 S1: Preset speed 1 ●/● − ● ●
12 13 S2: Preset speed 2 ●/● − ● ●
14 15 S3: Preset speed 3 ●/● − ● ●
16 17 S4: Preset speed 4 ●/● − ● ●
18 19 Jog run ●/● − ● ●
20 21 Emergency stop *2 ●/● ●/● ● ●
22 23 DC braking ●/● − ● ●
24 25 Acceleration/deceleration switching 1 ●/● − ● ●
26 27 Acceleration/deceleration switching 2 ●/● − ● ●
28 29 V/f switching signal 1 ●/● − ● ●
30 31 V/f switching signal 2 ●/● − ● ●
32 33 Torque limit switching 1 ●/● ●/● ● ●
34 35 Torque limit switching 2 ●/● ●/● ● ●
36 37 PID control OFF selection ●/● − ● ●
38 39 Pattern operation selection 1 ●/● − ● ●
40 41 Pattern operation selection 2 ●/● − ● ●
42 43 Pattern operation continuation signal ●/● − ● ●
44 45 Pattern operation trigger signal ●/● − ● ●
46 47 External thermal error ●/● − ● ●
48 49 Forced switching from communication to local ●/● − ● ●
50 51 Holdin
●/● − ● ●
52 53 PID differentiation/integration reset ●/● − ● ●
54 55 PID forward/reverse switching ●/● − ● ●
56 57 Forced continuous operation ●/● − ● ●
58 59 Specified speed operation ●/● − ● ●
60 61 Acceleration/deceleration suspend signal ●/● − ● ●
62 63 Power failure synchronized signal ●/● − ● ●
64 65 My function RUN signal ●/● ●/● ● ●
66 67 Auto-tuning signal ●/● − ● ●
68 69 Speed gain switching ●/● − ● ●
70 71 Servo lock signal ●/● − ● ●
72 73 Simple positioning (positioning loop) ●/● − ● ●
74 75 Integrating wattmeter display clear ●/● − ● ●
76 77 Trace back trigger signal ●/● − ● ●
78 79 Light-load high-speed operation prohibitive signal ●/● − ● ●
86 87 Binary data write ●/● ●/● ● ●
88 89 Up/Down frequency (up) *1 ●/● − ● ●
90 91 Up/Down frequency (down) *1 ●/● − ● ●
92 93 Up/Down frequency (clear) ●/● − ● ●
98 99 Forward/reverse selection ●/● ●/● ● ●
100 101 Run/Stop command ●/● ●/● ● ●
102 103 Commercial power/INV switching ●/● − ● ●
104 105 Frequency reference priority switching *3, 4 ●/● − ● ●
106 107 VI/II terminal priority ●/● − ● ●
108 109 Command terminal board priority *4 ●/● ●/● ● ●
111 111 Parameter editing enabling ●/● ●/● ● ●
112 113 Control switching (torque /position) ●/● ●/● − −
122 123 Rapidest deceleration command ●/● − ● ●
124 125 Preliminary excitation ●/● ●/● ● ●
126 127 Braking request ●/● − ● ●
130 131 Brake answer back input ●/● − ● ●
134 135 Traverse permission signal ●/● − ● ●
*1: Valid any time
*2: Independent of cmod, and all command are valid.
*3: Meaning differ from CC-Link. (ST is free run, frequency reference priority switching. is frequency priority)
*4: This function is assigned by the output signal, the instruction code, etc. by fixation.

 Loading...
Loading...











