ZED-F9P-Integration manual
by environmental factors such as multi-path and improves position accuracy especially in stationary
applications. By default, static hold mode is disabled.
If the speed drops below the defined "Static Hold Threshold", the static hold mode will be activated.
Once static hold mode has been entered, the position output is kept static and the velocity is set to
zero until there is evidence of movement again. Such evidence can be velocity, acceleration, changes
of the valid flag (e.g. position accuracy estimate exceeding the position accuracy mask, see also
section Navigation output filters), position displacement, etc.
The CFG-MOT-GNSSDIST_THRS configuration item additionally allows for configuration of
distance threshold. If the estimated position is farther away from the static hold position than this
threshold, static mode will be quit. The CFG-MOT-GNSSSPEED_THRS configuration item allows you
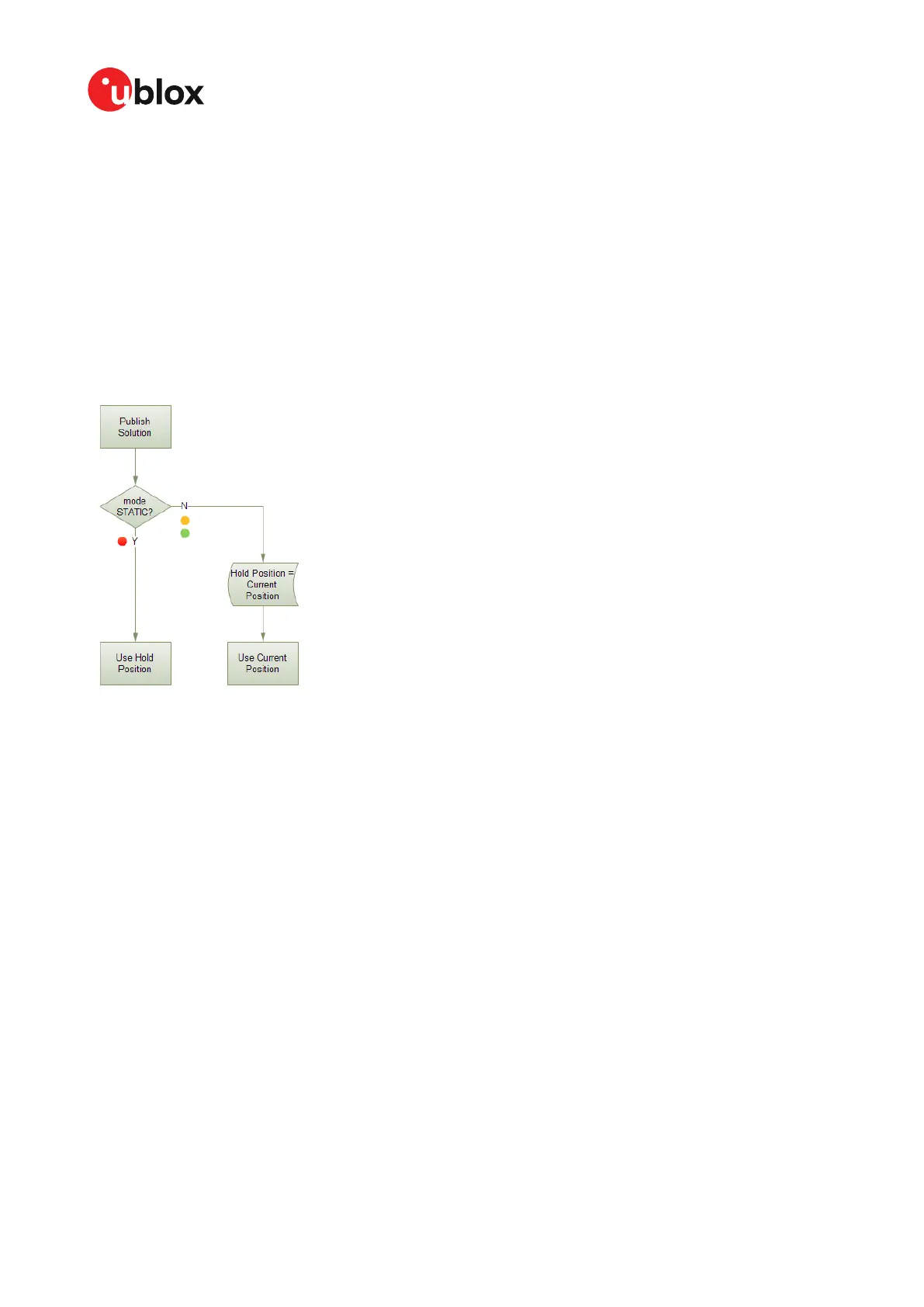
to set a speed that the static hold will release.
Figure 6: Position publication in static hold mode
UBX-18010802 - R08
3 Receiver functionality Page 25 of 110
Early production information
 Loading...
Loading...





