SVD48V series servo driver manual (PC software)
4.6.3.
Location mode
The position mode is divided into absolute position mode and relative position mode. The position mode works together
with the speed loop. Before running a given position, set the relevant parameters of the speed mode .
Reference speed : the maximum operating speed in position mode.
Given position : The given value of the position mode. The corresponding position information is given according to
the absolute position and the relative position.
Relative position : the given value is the increment of the position, such as 1024 line encoder, given 4096 , the
motor will make one revolution.
Absolute position : The given value is the absolute value of the position. The absolute value of the position is
initialized to 0 from the moment of power-on, and increases continuously thereafter, and returns to 0 after exceeding
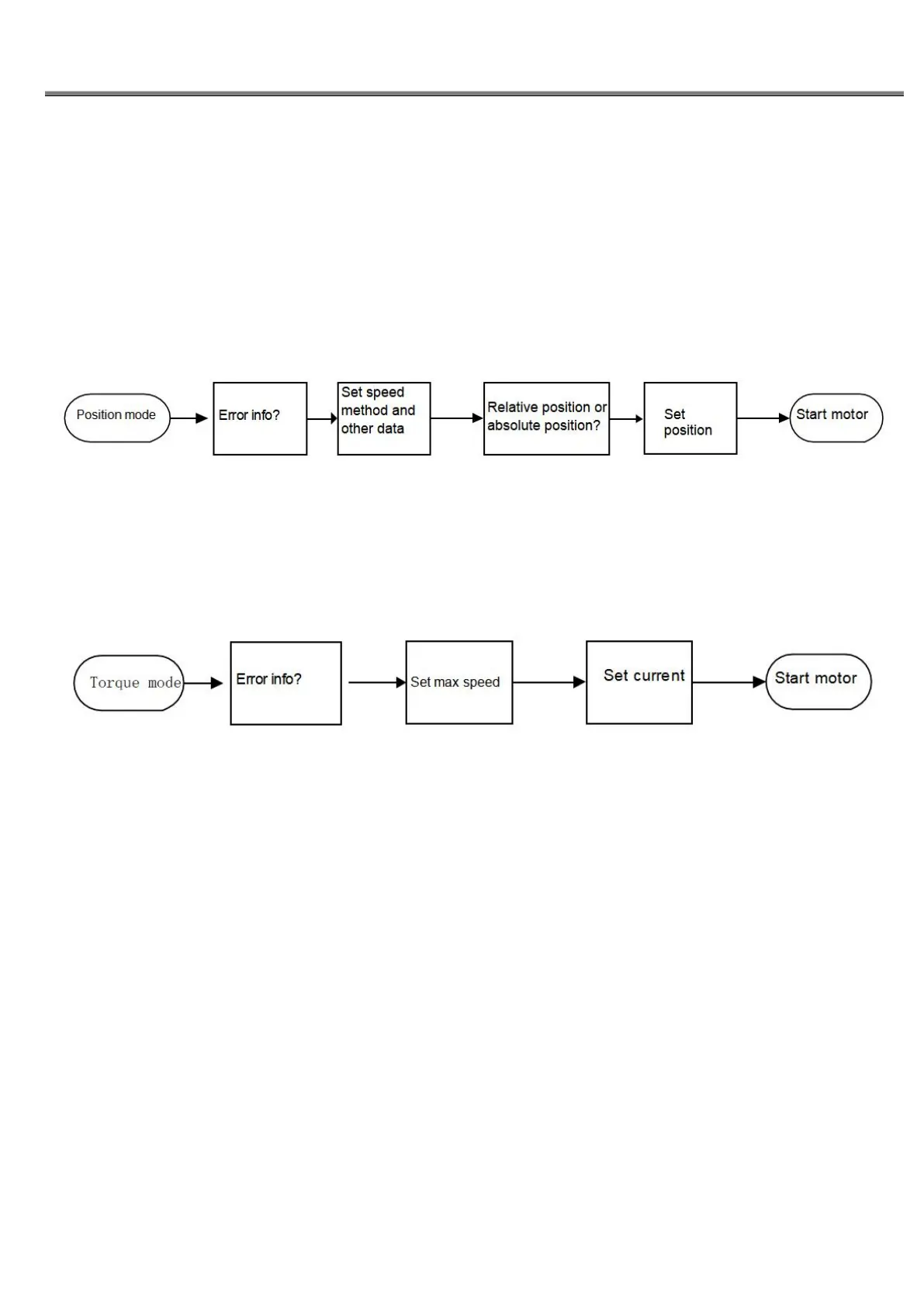
the range of int32 . Location mode usage process:
4.6.4.
Torque Mode
The torque mode only has a current loop in theory, but in order to limit the safety problems caused by the high speed
caused by the light load, we provide the maximum speed limit, that is, set the given speed as the maximum limit speed.
So before setting the given current, set the desired maximum limit speed. In this way, even if a larger given current is set,
the motor will not exceed the given speed under no-load condition.
Torque mode usage process:

 Loading...
Loading...