SVD48V series servo driver manual (PC software)
4.2.2.
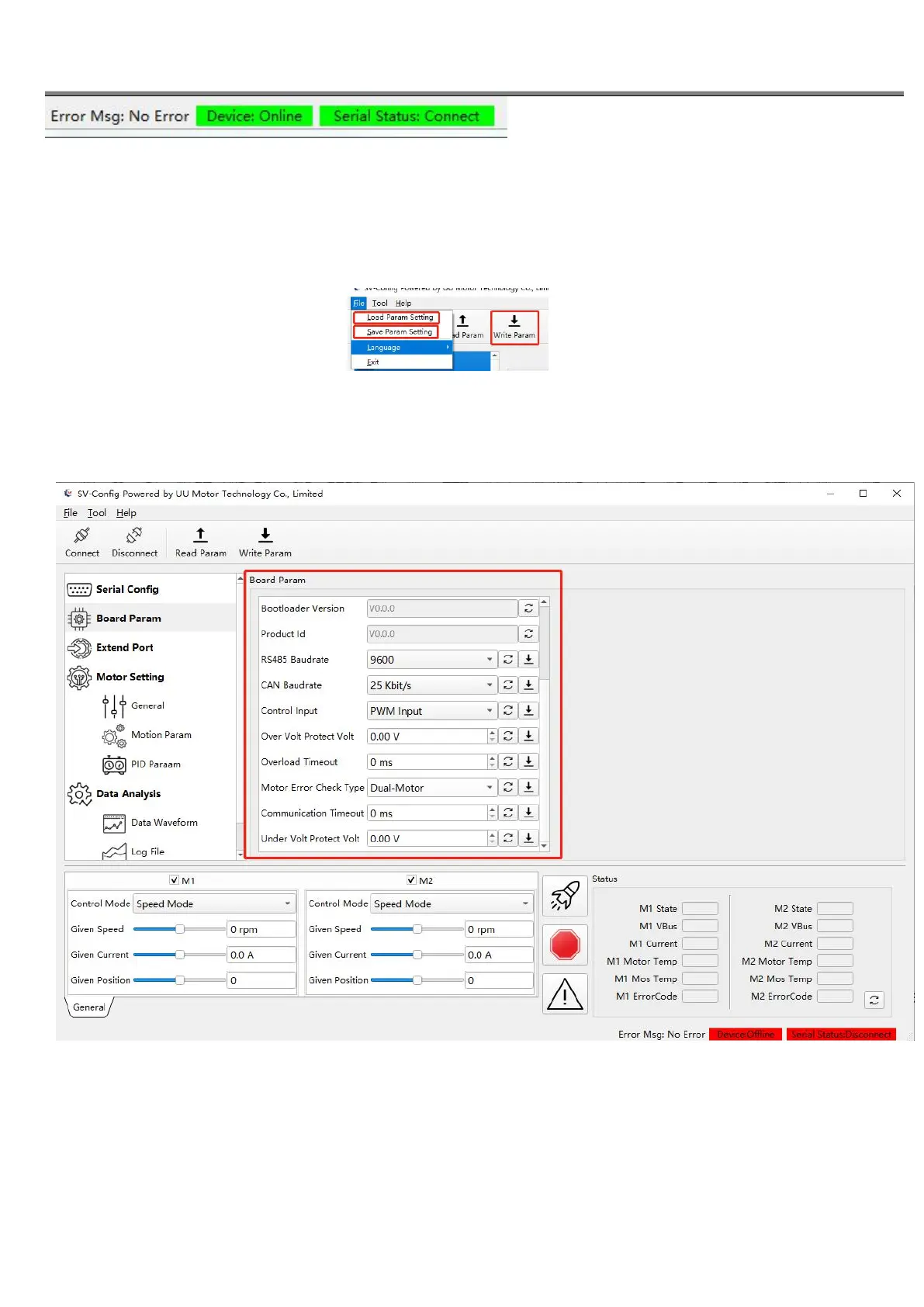
Import configuration parameters
We provide factory parameter configuration files. It is also possible to import parameter files that the user has
previously exported. The parameters imported into the configuration file will be updated to the set value list, but
they are not delivered and saved to the driver. After modifying the set values, you can directly save the
parameters to the driver through the "Write Param" button.
4.3.
Board parameters
The functional area, select the board parameters, configure the CAN/RS485 communication address Slaveid , and
configure the RS485 and CAN baud rates respectively. Set the overvoltage protection voltage , undervoltage
protection voltage, and control interface type. When the driver is powered on, if the supply voltage is not within the
range of the overvoltage protection voltage and the undervoltage protection voltage, an error will be reported.
4.4.
Motor settings
4.3.2.
General parameters
General parameters of the motor, check whether the information of the motor and encoder is correct.
4.3.2.1. General Motor Parameters
Motor Maximum RPM : Modified according to the maximum speed of the selected motor and the maximum speed
required by the user. The given speed is not allowed to be greater than the maximum speed of the motor.

 Loading...
Loading...