32
• Maximum holding torque refers to the holding torque at motor standstill when the rated current is supplied to the
motor (5-phase excitation), with consideration given to the permissible strength of the gear. Use this value to
compare motor torque performance. When using the motor with the dedicated driver, the driver’s “Automatic
current cutback” function at motor standstill reduces maximum holding torque by approximately 50%.
• The power source input current value represents the maximum current. (The input current varies according to the
pulse frequency.)
• Permissible torque is the marginal value of the mechanical strength of the gear unit. Use the product with a total
torque (load and acceleration) less than the permissible torque.
• Maximum overhung load indicates the value measured at 10mm (0.39in.) from the tip of the gear output shaft.
Note
•
Do not measure insulation resistance or perform the dielectric withstand test while the motor and driver are connected.
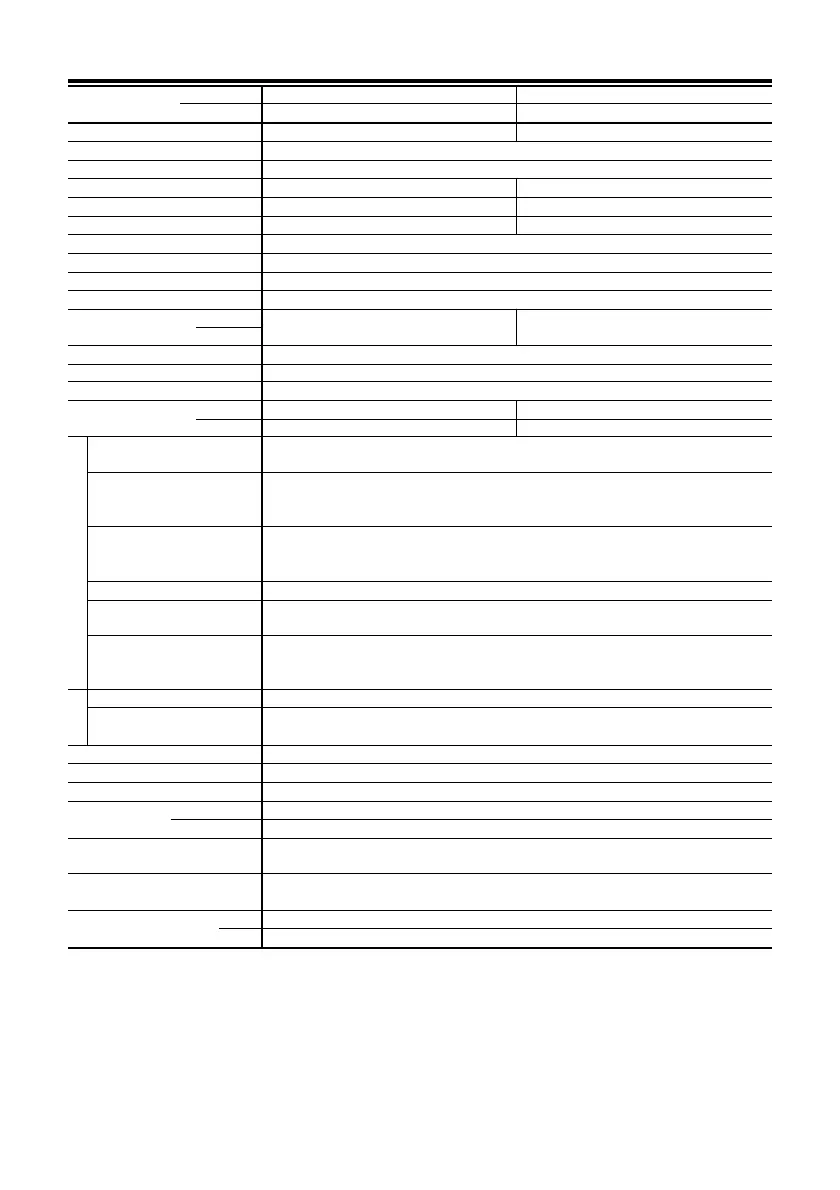
PMC33A1-HG50
PMC33B1-HG50
1.5 (213)
Package Model
Single Shaft
Double Shaft
Maximum Holding Torque
Rotor Inertia
Rated Current
Basic Step Angle
Gear Ratio
Permissible Torque
Maximum Torque
Permissible Thrust Load
Permissible Overhung Load N (lb.)
Direction of Gear Shaft Rotation
Permissible Speed Range
(Gear Output Shaft Speed)
Insulation Class
Power Source
Output Current
Excitation Mode
N·m (oz-in)
kg·m
2
(oz-in
2
)
A/phase
N·m (oz-in)
N·m (oz-in)
N (lb.)
12×10
-7
(0.066)
0.35
Input Signal Circuit
• Pulse Signal
(CW Pulse Signal)
• Rotation Direction Signal
(CCW Pulse Signal)
• Step Angle Signal
• All Windings Off Signal
•
Automatic Current Cutback
Release Signal
Output Signal Circuit
• Excitation Timing Signal
Functions
Indication (LED)
Driver Cooling Method
Mass
Insulation Resistance
Dielectric Strength
Ambient Temperature Range
Input Signals
Output Signals
Motor kg (lb.)
Driver kg (lb.)
Motor
Driver
PMC33A1-HG100
PMC33B1-HG100
2.0 (284)
0.0144°
50:1
1.5 (213)
2.0 (284)
0.0072°
100:1
2.0 (284)
2.8 (397)
Class B [130°C (266°F)]
DC24V±10% 0.7A or DC36V±10% 0.7A
0.35
100 (22)
200 (45)
Opposite to motor
0~70r/min
Photocoupler input, Input resistance 220Ω, Input current 20mA maximum
Signal voltage Photocoupler ON: +4~+5V, Photocoupler OFF: 0~+0.5V
Step command pulse signal (CW step command signal at 2-pulse input mode)
Pulse width: 5µs minimum, Pulse rise/fall: 2µs maximum
Motor moves when the photocoupler state changes from ON to OFF.
Rotation direction signal Photocoupler ON: CW, Photocoupler OFF: CCW
(CCW step command signal at 2-pulse input mode Pulse width: 5µs minimum, Pulse rise/fall: 2µs maximum
Motor moves when the photocoupler state changes from ON to OFF.)
Full Step at “photocoupler OFF” Half Step at “photocoupler ON”
When in the “photocoupler ON” state, the current to the motor is cut off and the motor shaft can be rotated manually.
When in the “photocoupler OFF” state, the current level set by the RUN switch is supplied to the motor.
When in the “photocoupler ON” state, the “Automatic Current Cutback” function at motor standstill is disabled.
When in the “photocoupler OFF” state, the “Automatic Current Cutback” function at motor standstill is activated.
(approximately 100ms after motor stops)
Photocoupler, Open-Collector Output External use condition: 24VDC maximum, 10mA maximum
Signal is output every time the excitation sequence returns to the initial “0”. (Photocoupler: ON)
Full step: Signal is output every 10 pulses, Half step: Signal is output every 20 pulses
Automatic current cutback, All windings off, Pulse input mode switch
Power Input
Natural Ventilation
0.21 (0.47)
0.025 (0.06)
100MΩ minimum under normal temperature and humidity, when measured by
a DC500V megger between the motor coils and the motor casing.
Sufficient to withstand 0.5kV, 60Hz applied between the motor coils and
casing for one minute, under normal temperature and humidity.
0°C~+40°C (+32°F~+104°F)
0°C~+40°C (+32°F~+104°F)
Full Step
Half Step
A/phase
Full Step
Half Step
0~35r/min
0.0144°/step
0.0072°/step
0.0072°/step
0.0036°/step
 Loading...
Loading...