282 Parameters
32
32 Supervision
Configuration of signal supervision functions 1…3.
Three values can be chosen to be monitored; a warning or
fault is generated whenever predefined limits are exceeded.
See also section Signal supervision (page 88).
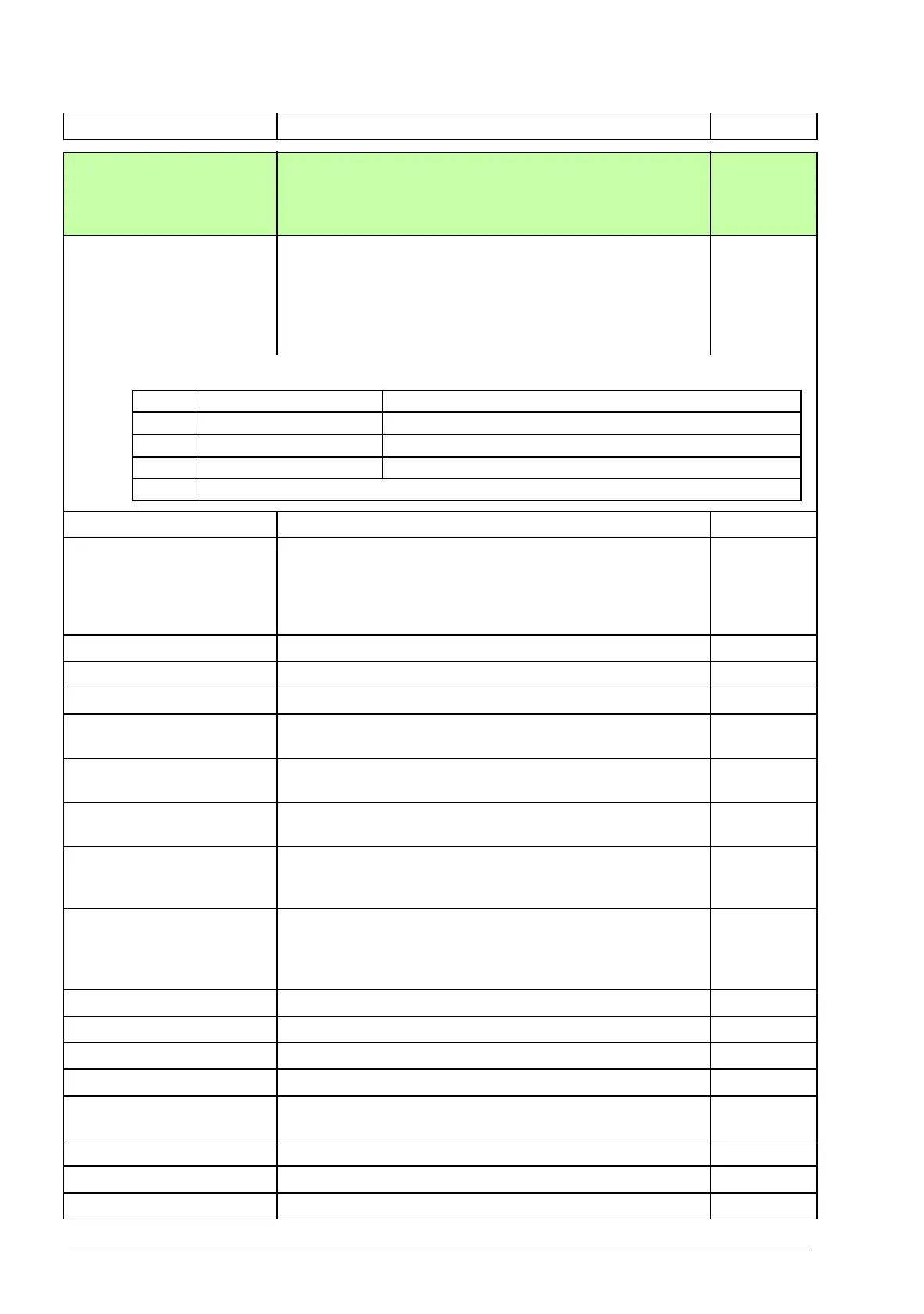
32.01 Supervision status Signal supervision status word.
Indicates whether the values monitored by the signal
supervision functions are within or outside their respective
limits.
Note: This word is independent of the drive actions defined by
parameters 32.06, 32.16 and 32.26.
0000b
0000…0111b Signal supervision status word. 1 = 1
32.05 Supervision 1
function
Selects the mode of signal supervision function 1. Determines
how the monitored signal (see parameter 32.07) is compared
to its lower and upper limits (32.09 and 32.10 respectively).
The action to be taken when the condition is fulfilled is
selected by 32.06.
Disabled
Disabled Signal supervision 1 not in use. 0
Low Action is taken whenever the signal falls below its lower limit. 1
High Action is taken whenever the signal rises above its upper limit. 2
Abs low Action is taken whenever the absolute value of the signal falls
below its (absolute) lower limit.
3
Abs high Action is taken whenever the absolute value of the signal rises
above its (absolute) upper limit.
4
Both Action is taken whenever the signal falls below its low limit or
rises above its high limit.
5
Abs both Action is taken whenever the absolute value of the signal falls
below its (absolute) low limit or rises above its (absolute) high
limit.
6
32.06 Supervision 1
action
Selects the action the drive takes when the value monitored
by signal supervision 1 exceeds its limits.
Note: This parameter does not affect the status indicated by
32.01 Supervision status.
No action
No action No action taken. 0
Warning A warning (A8B0 Signal supervision) is generated. 1
Fault The drive trips on 80B0 Signal supervision.2
Fault if running If running, the drive trips on 80B0 Signal supervision.3
32.07 Supervision 1
signal
Selects the signal to be monitored by signal supervision
function 1.
Zero
Zero None. 0
Speed 01.01 Motor speed used (page 117). 1
Frequency 01.06 Output frequency (page 117). 3
No. Name/Value Description Def/FbEq16
Bit Name Description
0 Supervision 1 active 1 = Signal selected by 32.07 is outside its limits.
1 Supervision 2 active 1 = Signal selected by 32.17 is outside its limits.
2 Supervision 3 active 1 = Signal selected by 32.27 is outside its limits.
3…15 Reserved

 Loading...
Loading...


















