Installation and Commissioning On-Site Installation
Product Manual IRB 6400R 17
2.5 Manually releasing the brakes
All axes come equipped with holding brakes. When the position of a manipulator axis
needs to be changed without connecting the controller, an external voltage supply
(24 V DC) must be connected to enable disengagement of the brakes. The voltage sup-
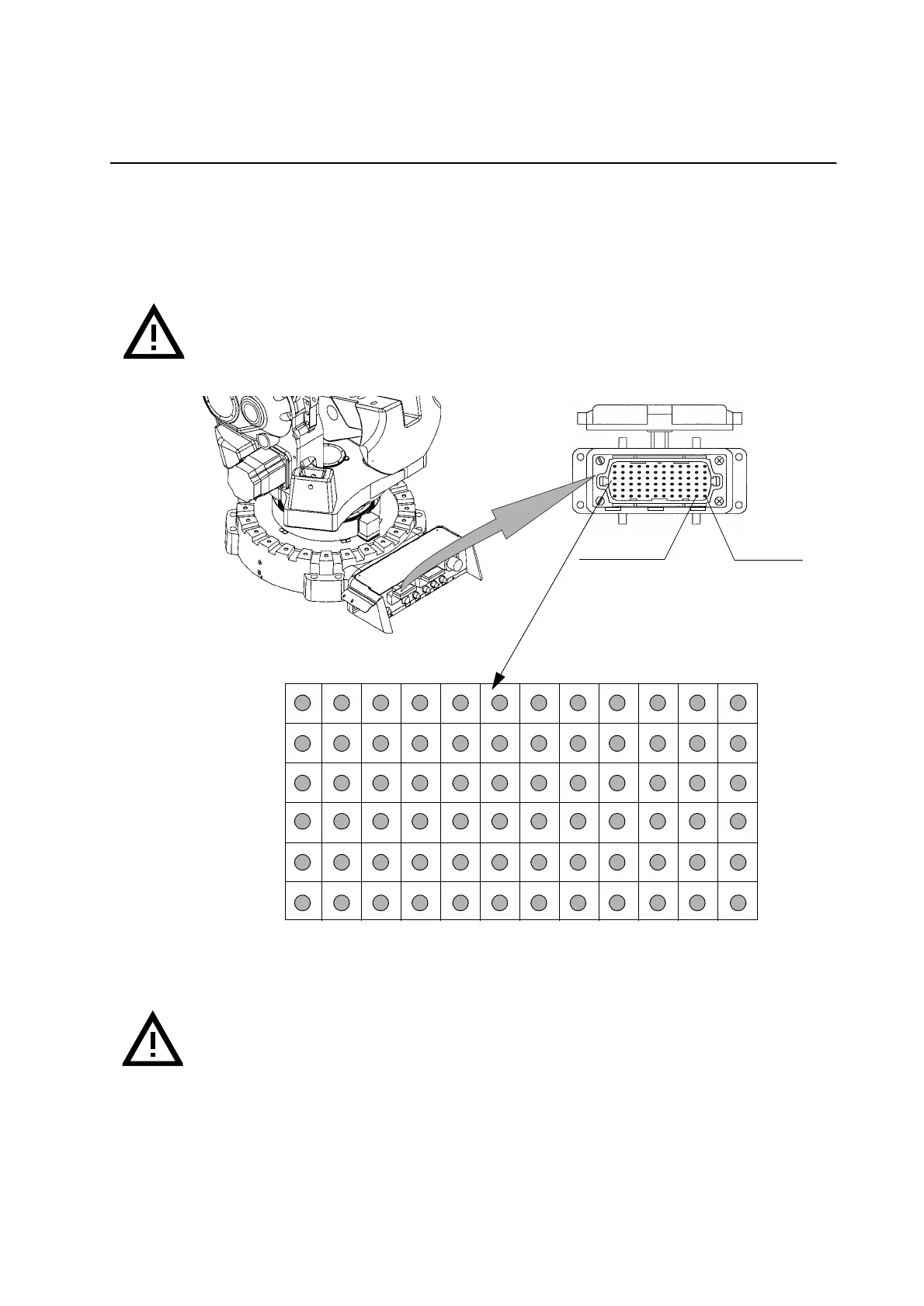
ply should be connected to the connector at the base of the manipulator (see Figure 11).
For robots with serial no. 64-15011 to 64-15015, the pins 37 (0V) and 33 (+24V)
are used to supply power for releasing the brakes.
Figure 11 Connection of external voltage to enable disengagement of the brakes.
External power must be connected as shown in Figure 11. Incorrectly connected
power can release all brakes, causing immediate movement of all axes.
When the controller or the voltage device is connected, as illustrated above, the brakes
can be released one by one by means of the push-buttons on the brake release unit on
the exterior of the axis 3 gear box. The push-buttons are marked with the appropriate
axis name. The names of the axes and their motion patterns are illustrated in Figure 12.
12 (0V)
1
13
25
37
49
61
24
36
48
60
72
12
11 ( +24V)

 Loading...
Loading...








