Action
The routine should now look like this:
PROC disp_ex3()
MoveJ *,v200,fine,tWeldGun;
13
MoveL *,v200,fine,tWeldGun;
Search_1D peEX1,*,*,v200, tWeldGun;
MoveL *,v200,fine,tWeldGun;
MoveL *,v200,fine,tWeldGun; ! New MoveL
Search_1D peEX1,*,*,v200,tWeldGun; ! New Search_1D
MoveL *,v200,fine,tWeldGun; ! Copy of MoveL
MoveJ *,v200,fine,tWeldGun;
PDispSet peEX1;
MoveL *,v200,fine,tWeldGun;
MoveL *,v200,fine,tWeldGun;
MoveL *,v200,fine,tWeldGun;
MoveL *,v200,fine,tWeldGun;
MoveL *,v200,fine,tWeldGun;
PDispOff;
MoveL *,v200,fine,tWeldGun;
ENDPROC
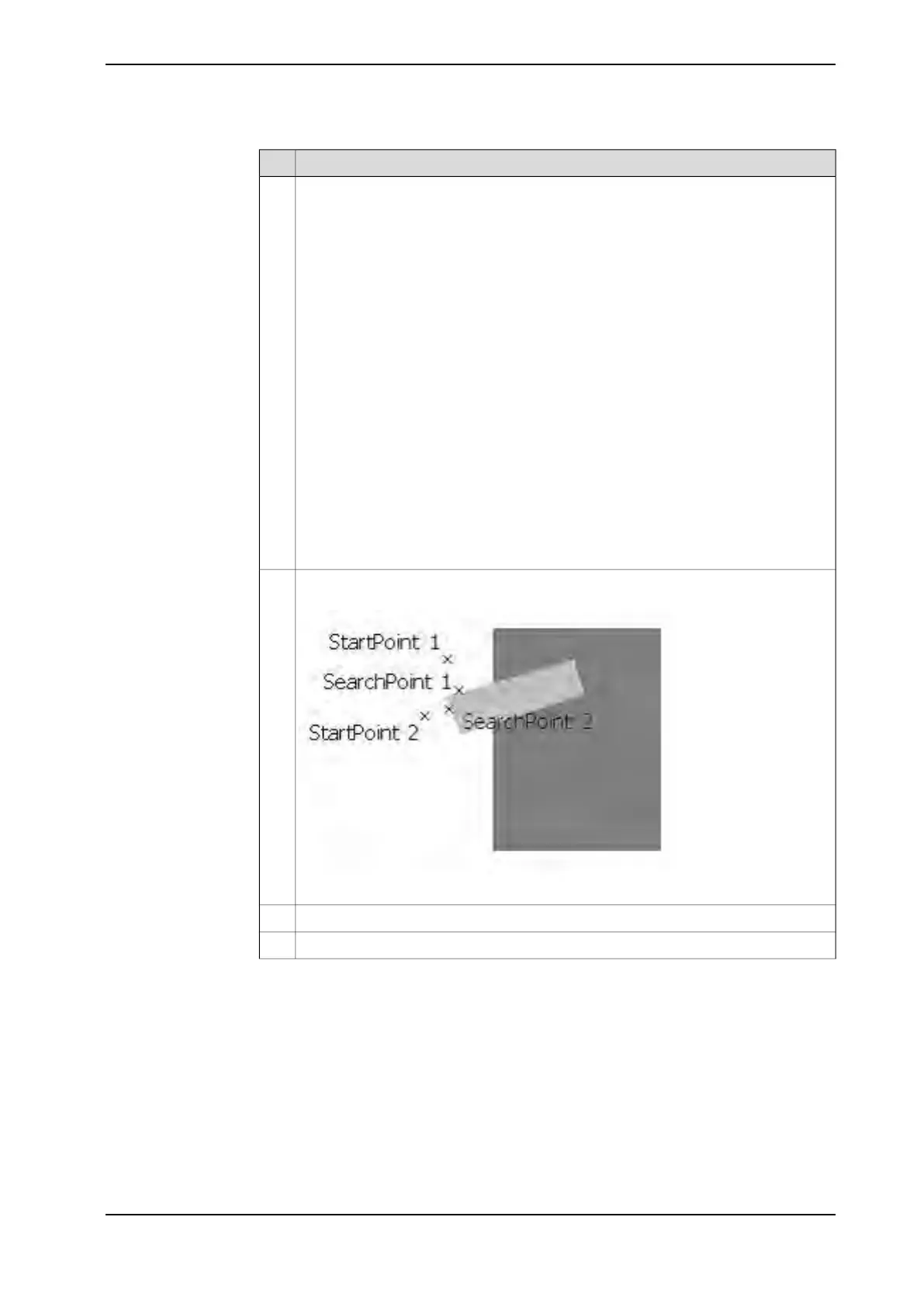
Modify the robtargets in the new Search_1D to search the end of the plate. The new
search will be referred to as search 2.
xx1400001501
14
Highlight the second Search_1D instruction and tap Enter.15
Tap OptArg to look at the optional arguments.16
Continues on next page
Application manual - SmarTac 51
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.5.2 Exercise 3: two-dimensional search
Continued