Program execution
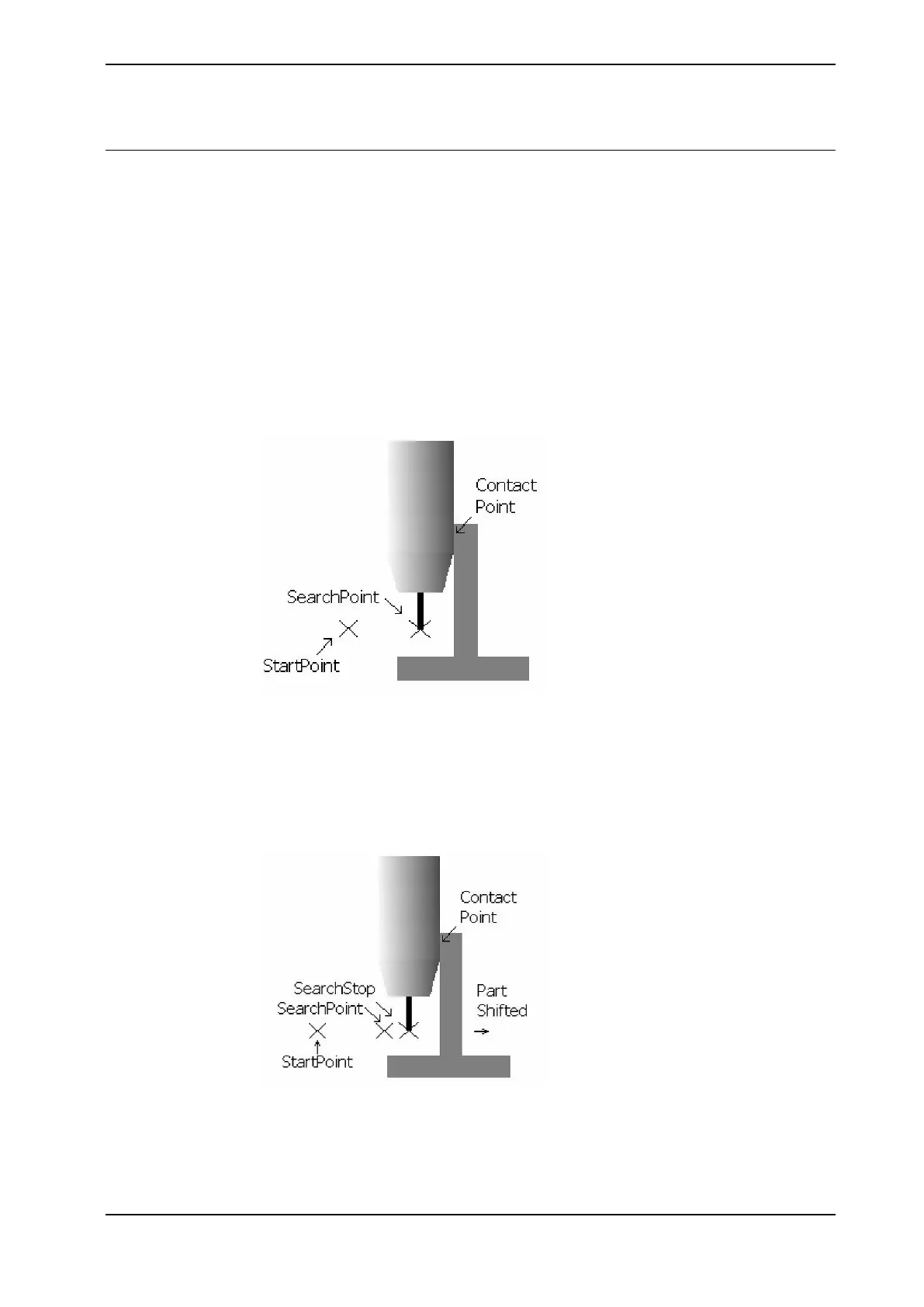
When executed, the robot makes a linear movement to the start point, StartPoint.
The SmarTac board is activated and motion starts towards the search point,
SearchPoint. The robot will continue past the search point for a total search
distance described by twice the distance between StartPoint and SearchPoint.
Once the part feature is sensed, motion stops, and the displacement data, Result,
is stored. This program displacement can later be used to shift programmed points
using the RAPID instruction PDispSet.
Normally the gas cup is used for searching, however, on some systems the wire
can be used for searching. When the switch, Wire, is selected, the digital output,
doWIRE_SEL, is set high. This switches the SmarTac signal from the gas cup to
the wire.
xx1400001490
The StartPoint and SearchPoint are programmed. The two points determine
the direction of the search. The SearchPoint is programmed so the torch is
touching the part feature. The Result is the difference between the programmed
SearchPoint, and the actual SearchStop that is found when a different part is
present.
xx1400001491
Continues on next page
Application manual - SmarTac 83
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
6 RAPID reference
6.1.1 Search_1D - One-dimensional search
Continued