4. Program debugging
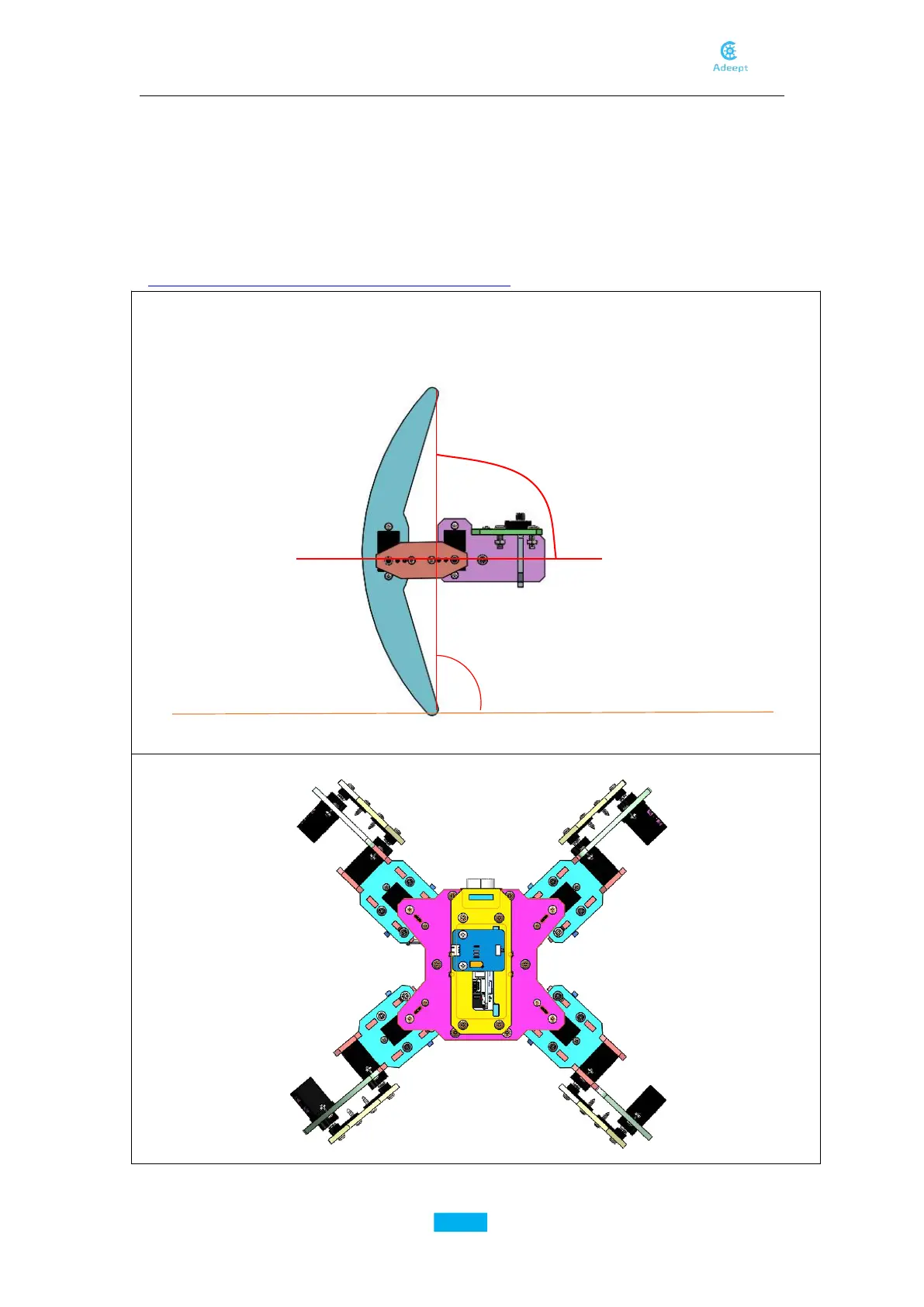
After the assembly is completed, the error of the servo itself will cause an angle de
viation of the robot's foot. At this time, each leg of the robot needs to be adjusted
to the correct angle as shown in the following figure by modifying the program.
Only then the robot can work normally. Refer to the following link for video tutoria
l: https://www.adeept.com/video/detail-68.html