546 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
The following table shows acceptable combinations of Acceleration Units and
Jerk Units when Speed is in Master Units.
Acceleration Units and Jerk Units when Speed is in Master Units
Speed Units in Master Units
Acceleration (Speed in MasterUnits)
Units per sec2
(Time
Driven
Mode Units)
% Maximum
(Time Driven
Mode Units)
Seconds
(Time
Driven
Mode Units)
Units per MasterUnit2
(Master Driven
Mode Units)
Master Units
(Master Driven
Mode Units)
Jerk Units
Units per sec3
(Time Driven Mode Units)
Incompatible combinations of Time and Master Driven
mode. An error occurs when you verify the routine.
Incompatible combinations of Time and Master
Driven mode. An error occurs when you verify
the routine.
% Maximum
(Time Driven Mode Units)
% of Time
(Time Driven Mode Units)
Seconds
(Time Driven Mode Units)
Units per MasterUnits3
(Master Driven Mode
Units)
Incompatible combinations of Time and Master Driven
mode. An error occurs when you verify the routine.
Not Implemented Not Implemented
% of Time -Master Driven
(Master Driven Mode
Units)
Not Implemented New Enumeration
Master Units
(Master Driven Mode
Units)
Not Implemented New Enumeration
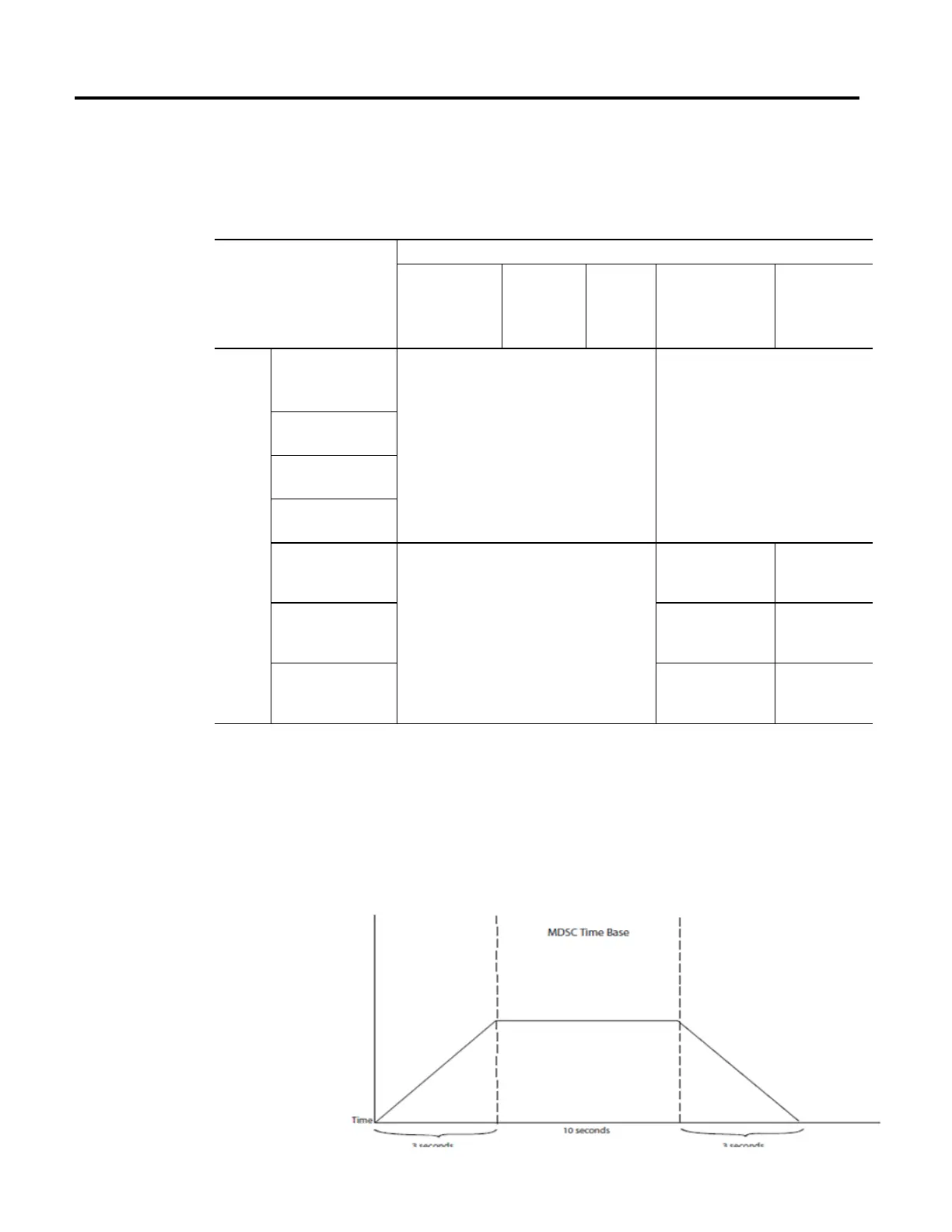
With time based planning, the dynamics of the move, that is, the Speed,
Acceleration, Deceleration, or Jerk can be directly programmed in units of
seconds.
MDSC Time Base Example
 Loading...
Loading...


