42 Rockwell Automation Publication 2080-UM001B-EN-E - November 2011
Appendix C IPID Function Block
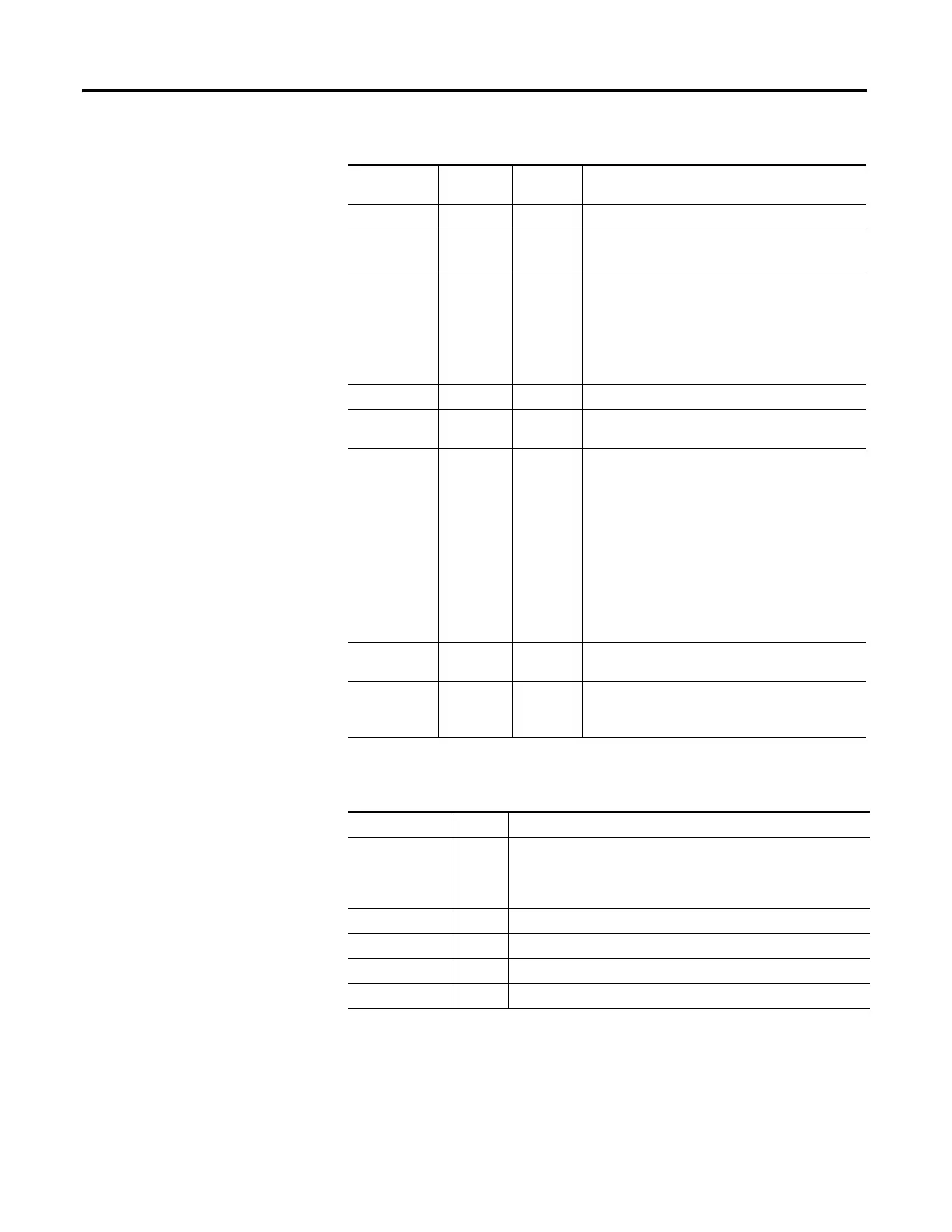
AutoTune Input BOOL Start AutoTune sequence
ATParameters Input AT_Param Auto tune parameters
See AT_Param Data Type
ErrorMode Input DINT Mode used to handle errors. Possible value are:
• 0 — No error message ErrLog file.
• 1 — Prints error message level 1 in ErrLog file.
• 2 — Prints error message level 1 and level 2 in
ErrLog file.
Output Output Real Output value from the controller
AbsoluteError Output Real AbsoluteError is the difference between Process
value and set point value
ATWarnings Output DINT Warning for the Auto Tune sequence. Possible value
are:
• 0 — No auto tune done
• 1 — Auto tuning in progress
• 2 — Auto tuning done
• -1 — Error 1: Controller input “Auto” is TRUE,
please set it to False
• -2 — Error 2: Auto tune error, the ATDynaSet time
expired
OutGains Output GAIN_PID Gains calculated from AutoTune Sequences. See
GAIN PID Data type
ENO Output BOOL Enable out.
Only applicable to LD, “ENO” is not required in FBD
programming.
GAIN_PID Data Type
Parameter Type Description
DirectActing BOOL Types of acting:
• TRUE – Direct acting
• FALSE – Reverse acting
ProportionalGain REAL Proportional gain for PID ( >= 0.0001)
TimeIntegral REAL Time integral value for PID ( >= 0.0001)
TimeDerivative REAL Time derivative value for PID ( >= 0.0)
DerivativeGain REAL Derivative gain for PID ( >= 0.0)
IPIDCONTROLLER Arguments
Parameter Parameter
Type
Data Type Description