Rockwell Automation Publication 2080-UM001B-EN-E - November 2011 43
IPID Function Block Appendix C
How to AutoTune
Before you continue, be sure that:
• the system is a stable system
• the "Auto" input to the IPIDCONTROLLER is set to false
• AT_Param is set
To autotune, perform these steps:
1. Set the "Initialize" input to "TRUE".
2. Set the "AutoTune" input to "TRUE".
3. Change the "Initialize" input to "FALSE".
4. Wait until the "ATWarning" output value changes to"2".
5. Get the tuned value from "OutGains".
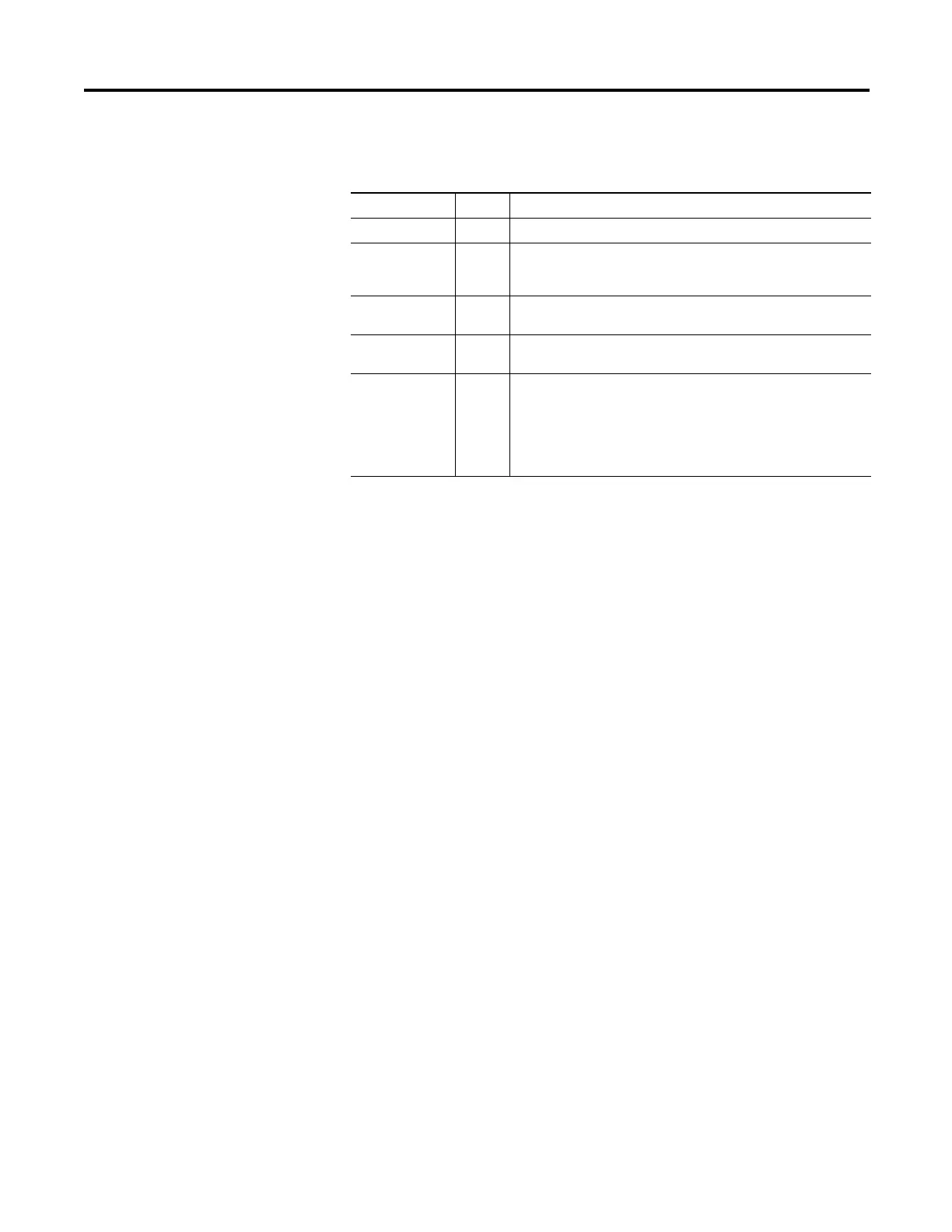
AT_Param Data Type
Parameter Type Description
Load REAL Initial controller value for Auto tuning process.
Deviation REAL Deviation for auto tuning. This is the standard deviation used to
evaluate the noise band needed for AutoTune (noise band = 3*
Deviation)
Step REAL Step value for AutoTune. Must be greater than noise band and less
than ½ load.
ATDynamSet REAL Auto Tune time (in seconds). Auto Tune process will be stopped when
ATDynamSet time expires
ATReset BOOL Determines whether the output value is reset to zero after an
AutoTune sequence:
• True – Reset IPIDCONTROLLER output to zero after Auto tune
process.
• False – leaves output at load value
 Loading...
Loading...







