Preface
MicroLogix 1000 Programmable Controllers User Manual
12–14
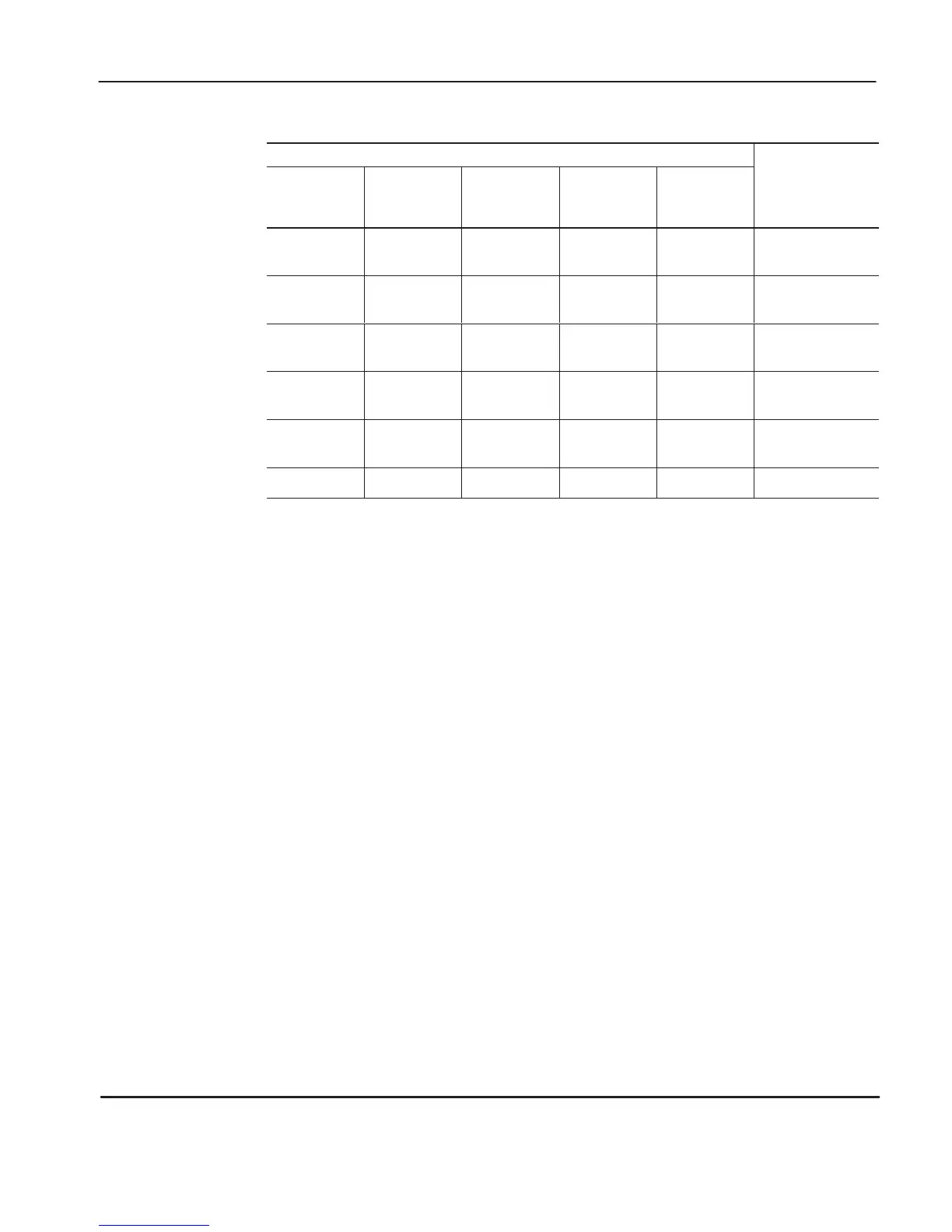
Bidirectional Counter with Reset and Hold (Up/down count)
Input State
Input Up
Count
(I/0)
Input Down
Count
(I/1)
Input Reset
(I/2)
Input Hold
(I/3)
HSC Rung
High-Speed
Counter Action
Turning
Off-to-On
Off, On, or
Turning Off
Off, On, or
Turning Off
Off True Count Up
Off, On, or
Turning Off
Turning
Off-to-On
Off, On, or
Turning Off
Off True Count Down
NA NA
Off, On, or
Turning Off
NA False Hold Count
NA NA
Off, On, or
Turning Off
On NA Hold Count
Off, On, or
Turning Off
Off, On, or
Turning Off
Off, On, or
Turning Off
NA NA Hold Count
NA NA Turning On NA NA Reset to 0
NA (Not Applicable)
When
up and down input pulses occur simultaneously
, the high-speed counter
counts up, then down.
Using the Bidirectional Counter with Reset and Hold with a Quadrature
Encoder
The Quadrature Encoder is used for determining direction of rotation and position
for rotating, such as a lathe. The Bidirectional Counter counts the rotation of the
Quadrature Encoder.
Bidirectional Counters operate in the –32,768 to +
32,767 range inclusive and can be
reset to zero using the reset (RES) instruction. The following figure shows a
quadrature encoder connected to inputs 0, 1, and 2. The count direction is
determined by the phase angle between A and B. If A leads B, the counter
increments. If B leads A, the counter decrements.
The counter can be reset using the Z input. The Z outputs from the encoders
typically provide one pulse per revolution.
efesotomasyon.com - Allen Bradley,Rockwell,plc,servo,drive

 Loading...
Loading...






