322 Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
Enumeration Usage Name Description
2 R/PV Velocity Control Controls the velocity of the motor.
3 O/C Acceleration Control Controls the acceleration of the motor.
4 R/C Torque Control Controls the torque output of the motor.
5...15
Reserved -
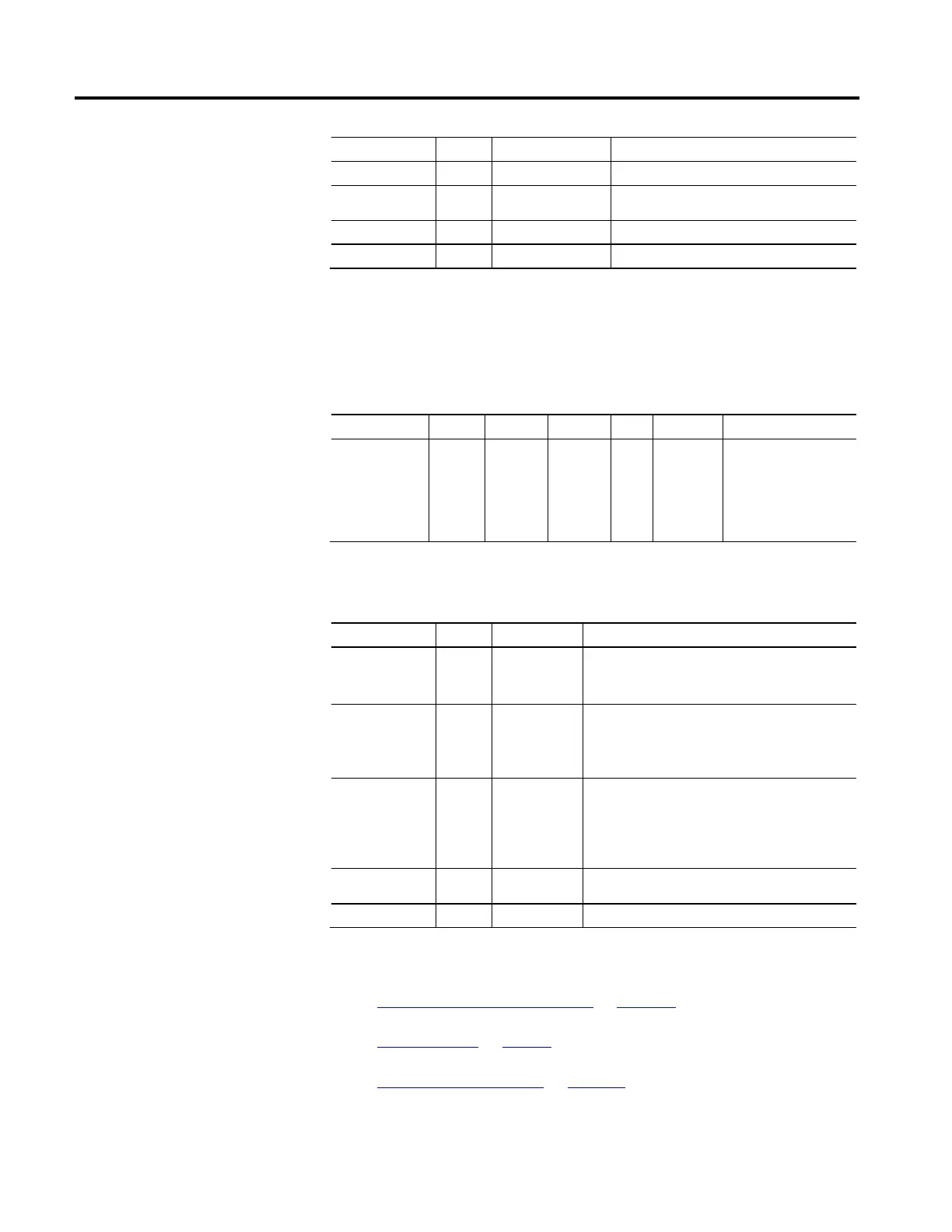
Control Method
The Control Method (derived from axis configuration) attribute is an 8-bit
enumerated code that determines the basic motor control algorithm applied by
the device to control the dynamic behavior of the motor.
Usage Access Data Type Default Min Max Value Description
Required - All
Derived from Axis
Configuration
Get/
GSV
USINT 0 0 2 Enumeration
0 = No Control
1 = Frequency Control
2 = PI Vector Control
3...255 = Reserved
This value is sent to the drive during initialization and cannot be changed during
operation.
Enumeration Usage Name Description
0 R/N No Control
Associated with a Control Mode of No Control where there is
no explicit motor control provided by the device for this axis
instance.
1 R/F Frequency Control
An open loop control method that applies voltage to the
motor, generally in proportion to the commanded frequency
or speed. This control method is associated with Variable
Frequency Drives (VFDs) or so called Volts/Hertz drives.
2 R/C PI Vector Control
A closed loop control method that uses actual or estimated
feedback for closed loop cascaded PI control of motor
dynamics, for example, position, velocity, acceleration, and
torque, and always includes independent closed loop PI
control of Iq and Id components of the motor current vector.
3...127
Reserved -
128...255
Vendor Specific -
See also
Interpreting the Attribute Tables on page 87
Control Modes on page 16
Control Mode Attributes on page 187

 Loading...
Loading...












