8 Rockwell Automation Publication 20D-TD002L-EN-P - July 2018
PowerFlex 700S Drives with Phase II Control
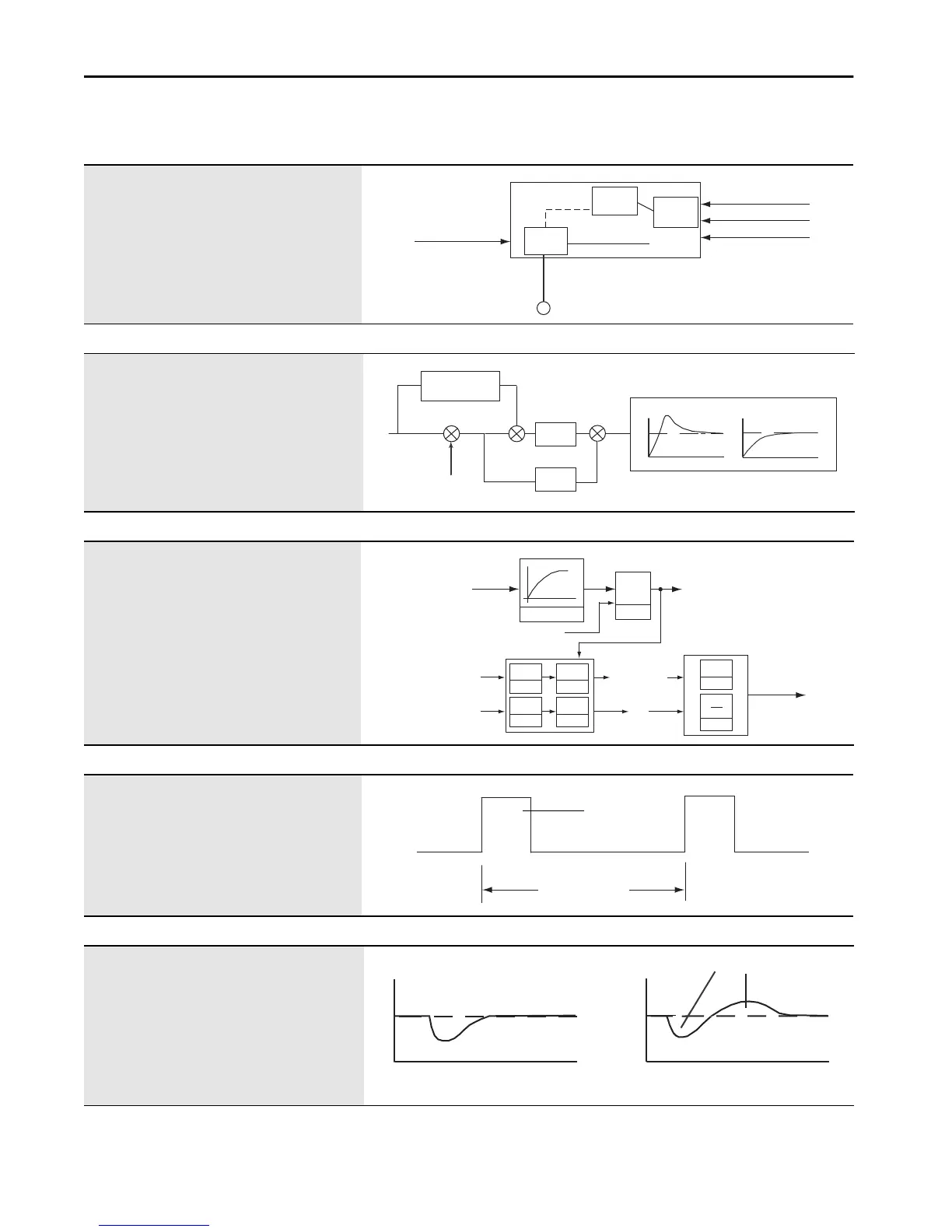
Performance
Digital Current Regulator outperforms older style analog regulators
in speed, repeatability, and drift.
Negative Feed Forward reduces or eliminates overshoot during step
speed changes. Helpful in preventing backup during stopping.
Coarse-to-Fine interpolation for DriveLogix Motion, direct
positioning for precise control and point-to-point for indexing are all
features of the Integral Position Loop. The loop easily handles
applications such as simple indexing and electronic line shaft.
Advanced Edge-to-Edge Algorithms and pulse position averaging
provide extremely accurate speed measurement and excellent
performance at very low speed.
Servo Lock compensates for lost position during step loads to the
velocity regulator. Offers optimum performance for draw applications
and others.
Derivative
Gain Block
Current
Magnitude
Calculator
PI Gain
Block
Current Limit
U Phase Motor Current
W Phase Motor Current
Current Limit Level
Proportional Channel
Integral
Channel
V Phase Motor Current
Kp
Ki
Negative
Feed Forward
Speed Ref
Speed
Feedback
n = 0
V
t
V
t
n = 0.3
Interpolator
Accum
Σ
Accum
Σ
Deriv
Δ
Position osets
Position Error
K
kp
Position Speed
Speed FDBK
Position FDBK
Position Command
Position Target
Accum
Σ
Deriv
Δ
P Gain
ki
s
I Gain
Edge to Edge Time
X
pulse
t
edge.edge
V
t
without Servo Lock
V
t
A1 = A2
Velocity Response to Step Load
with Servo Lock

 Loading...
Loading...









