POS MV V5 Installation and Operation Guide
Interfaces and Data Formats
Copyright © Applanix Corporation, 2017
$PASHR ($PASHR-TSS): Attitude Data
POS MV supplies attitude data information in the following ASCII NMEA sentence format.
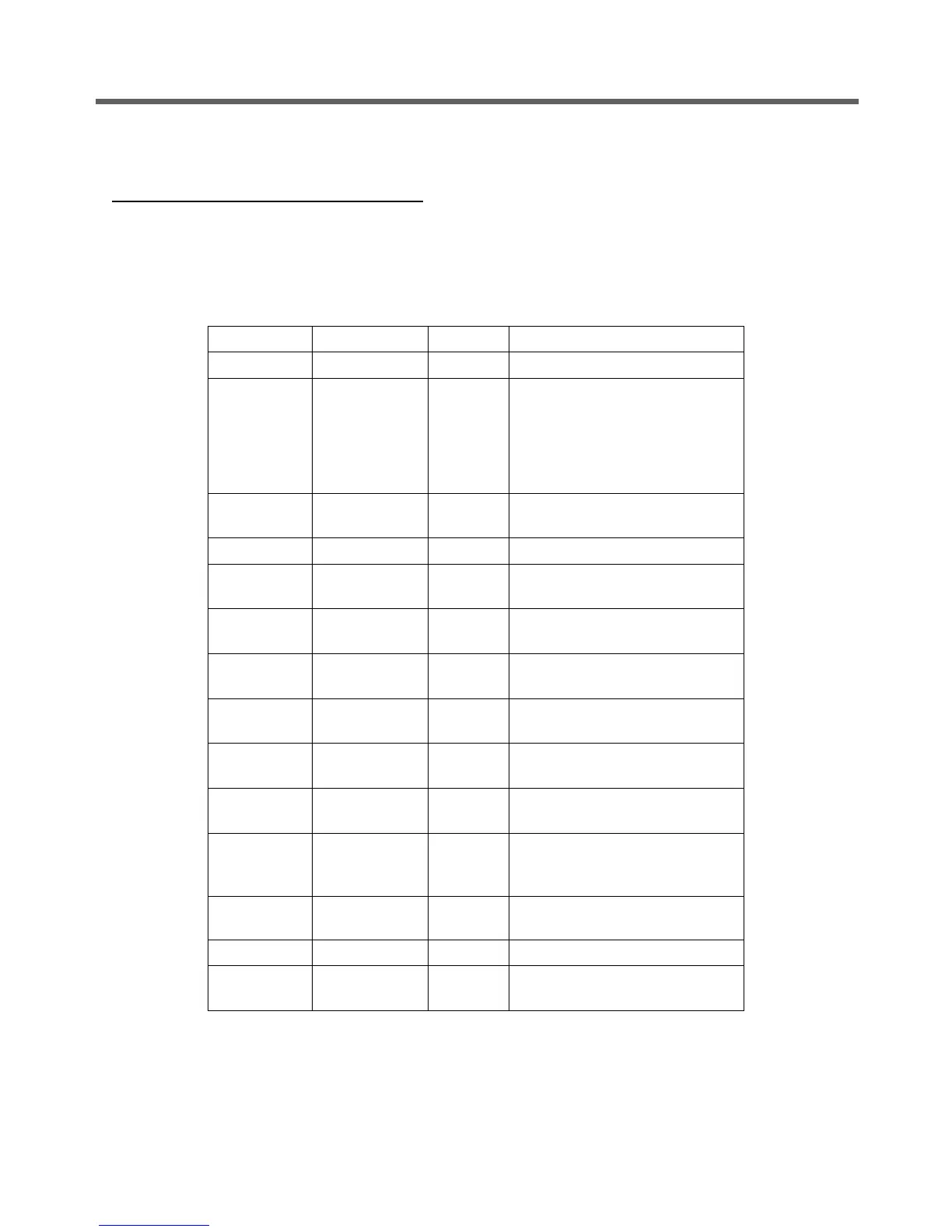
$PASHR,hhmmss.sss,xxx.xx,T,RRR.RR,PPP.PP,HHH.HH,
a.aaa,b.bbb,c.ccc,d,e*hh<CRLF>
Table 20: $PASHR Sentence Format
hours|minutes|seconds|decimal
seconds
2 fixed digits for minutes
2 fixed digits for seconds
• 3 digits for decimal seconds
0 = no aiding
1 = GNSS aiding
0 = IMU out
1 = satisfactory
Carriage return
and line feed
Note:Commas separate all items. Two attitude data strings are available. The strings are identical except for the
definition of roll and pitch angles. One string uses Tait-Bryan angles and the other uses TSS angles. Use the MV-
POSView Controller program to set the required angle convention. Refer to COM Port Set-up on page 4-14 for
instructions and Mounting Angles on page 2-29 for a definition of the Tait-Bryan angles. The information is valid in the
vessel frame, except for heave, which is valid in the sensor 1 frame.