Product overview
EL28xx-xxxx 39Version: 2.2
DIG Safe State Active (index 0x80n0:01 [
}
41]) / DIG Safe State Value (index 0x80n1:01 [
}
41])
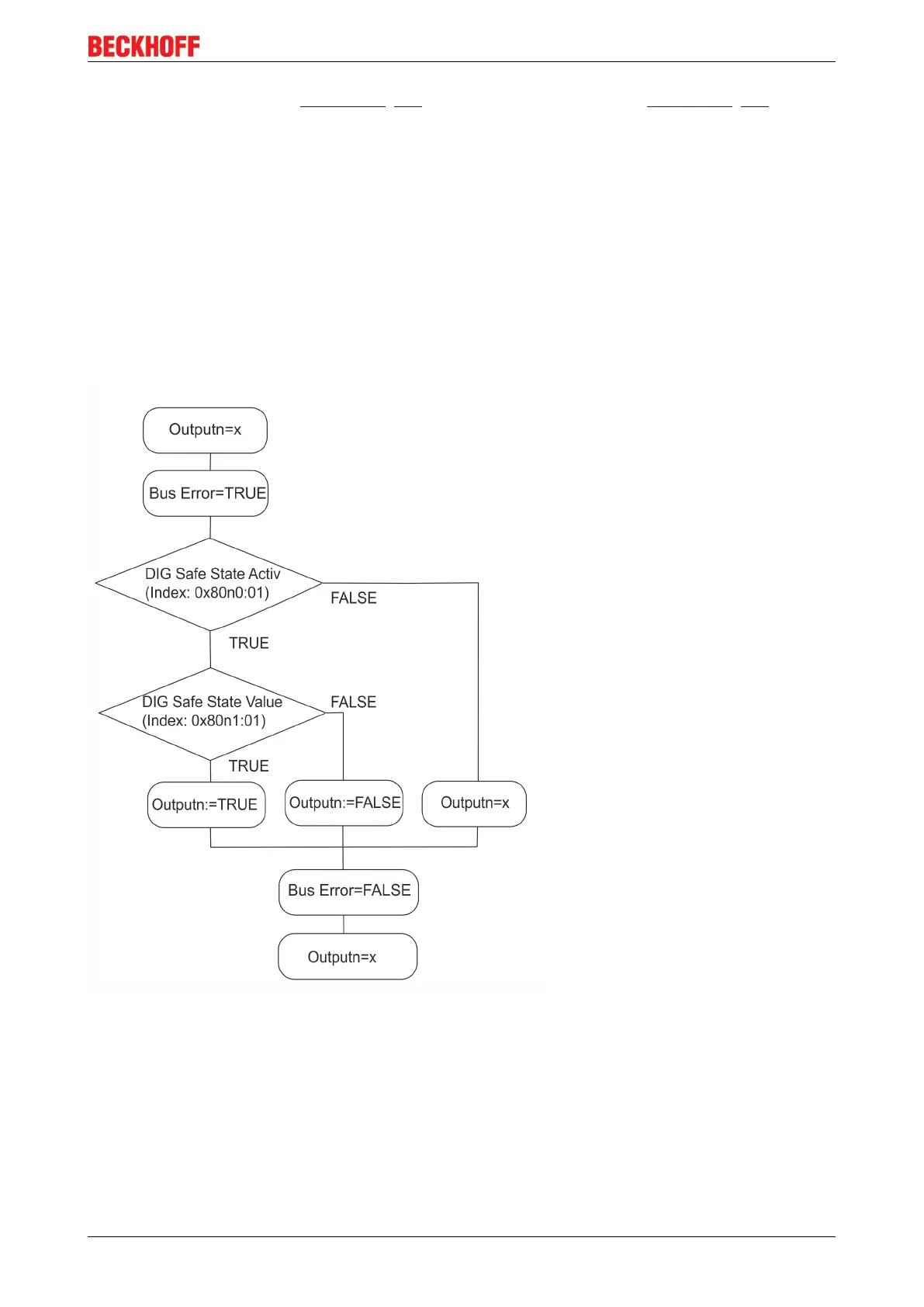
The setting in “DIG Safe State Active” (index 0x80n0:01) defines whether the outputs should assume a safe
state in the case of a bus error. The safe state of the output in the case of a bus error is defined with “DIG
Safe State Value” (index 0x80n1:01).
1. “DIG Safe State Active“ = TRUE and
◦ “DIG Safe State Value“ = TRUE: the output is switched on.
2. “DIG Safe State Active“ = TRUE and
◦ “DIG Safe State Value“ = FALSE: the output is switched off
3. “DIG Safe State Active“ = FALSE
◦ The state of the output is retained. Entries in “DIG Safe State Value” (index 0x80n1:01) have no
effect.
Flow-chart illustration of the sequence in case of a bus error
Fig.30: EL2819 Change of state of the outputs in the case of a bus error