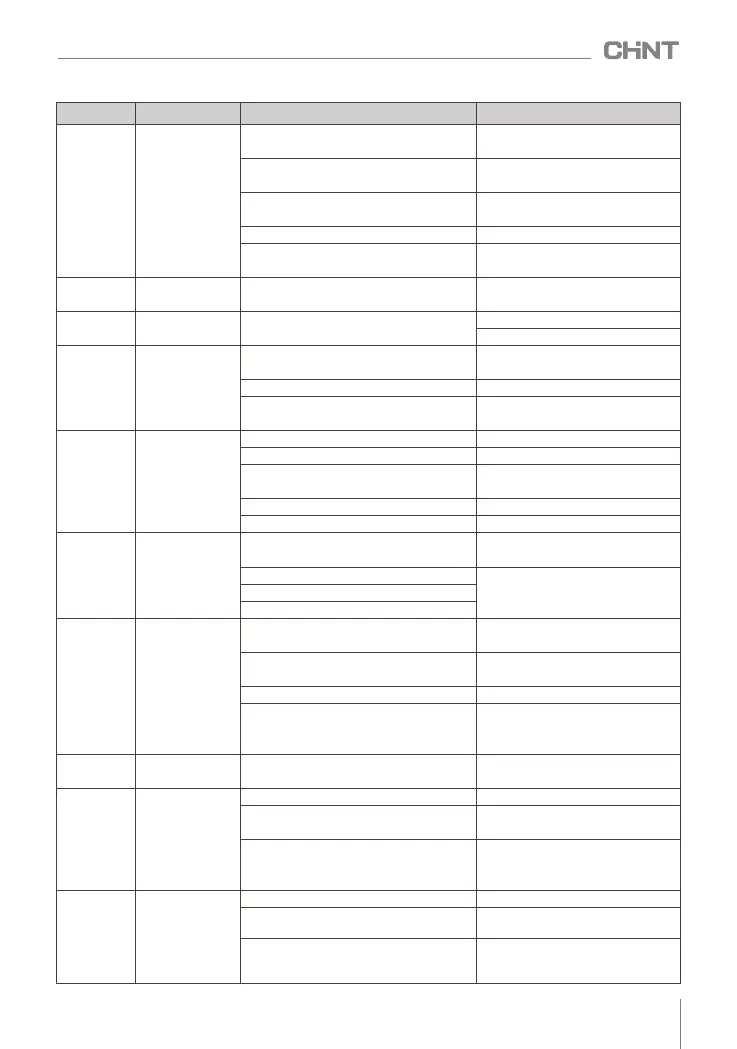
E.OL1
Motor overload
1. The motor overload protection coefficient
is not set correctly
Correctly set the motor overload
protection coefficient
2. The motor stalls or the sudden change of
load is too large
check load
3. Long-term low-speed and heavy-load
operation of general - purpose motors
Choose a dedicated motor
4. Grid voltage is too low Check grid voltage
5. The V/F curve is not suitable
Correctly set the V/F curve and torque
boost
E.EF
External device
failure
External fault emergency stop terminal is
valid
After the external fault is cancelled,
release the external fault terminal
E.EEP
Abnormal EEPROM
An error occurred while reading and writing
control parameters
STOP key reset
E.tE
Abnormal motor
self-learning
1. Motor nameplate parameter setting error
Correctly set the parameters
according to the motor nameplate
2. Perform reverse rotation self-tuning when
reverse rotation is prohibited
cancel prohibit reverse
3. Poor contact of motor connecting wire
Check motor wiring
error code
Fault type
Possible cause of failure
Countermeasures
seek service
E.CE
abnormal
communication
1. The upper computer is not working
properly
Check the upper computer wiring
2. The communication line is abnormal Check the communication cable
3. The communication parameter setting is
incorrect
Correctly set communication
parameters
E.SHt
Abnormal
contactor
1. Grid voltage is too low Check grid voltage
2. The contactor is damaged
Replace the main circuit contactor
3. The power-on snubber resistor is
damaged
Replace snubber resistor
4. The control circuit is damaged
seek service
5. Input phase loss
Check input RST wiring
E.ItE
Abnormal current
detection circuit
1. The control board connection or plug-in
is loose
Check and rewire
2. The auxiliary power supply is damaged
seek service
3. The Hall device is damaged
4. The amplifier circuit is abnormal
4. Self - learning timeout
Check F0.08 ( operating frequency
upper limit ) to see if the set value of
F0.08 is lower than the rated frequency
E.Fb L
PID feedback lost
at runtime
PID feedback is less than FE .18 set value
Check the PID feedback signal or set
FE. 18 to a suitable value
E.OS
Motor Overspeed
Fault
1. The encoder parameter setting is incorrect
Correctly set the encoder parameters
2. No parameter identification
Carry out motor parameter
identification
3. Motor overspeed detection parameters
FE.20 , FE.21 settings are unreasonable
Set the detection parameters
reasonably according to the actual
situation
E . dEv
Excessive speed
deviation fault
1. The encoder parameter setting is incorrect
Correctly set the encoder parameters
2. No parameter identification
Carry out motor parameter
identification
3. The setting of detection parameters FE.22
and FE.23 for excessive motor speed
deviation is unreasonable
Set the detection parameters
reasonably according to the actual
situation
079
NVF2G-S Series Inverter User's Guide
 Loading...
Loading...