©2014 Clearpath Robotics Inc. All Rights Reserved.
USING ROS
Robot Operating System (ROS) is an extensible framework for controlling and working with
robotic systems. Clearpath Robotics recommends using ROS with Husky. If this is your first
time using ROS, it is strongly recommended to run through our series of ROS101 blogs articles
to learn the basics of ROS http://www.clearpathrobotics.com/blog/how-to-guide-ros-101/.
Nodes
You can use rosnode list to see all the nodes running by default on a Husky computer. The
baseline set of these is presented with commentary in Table 3.
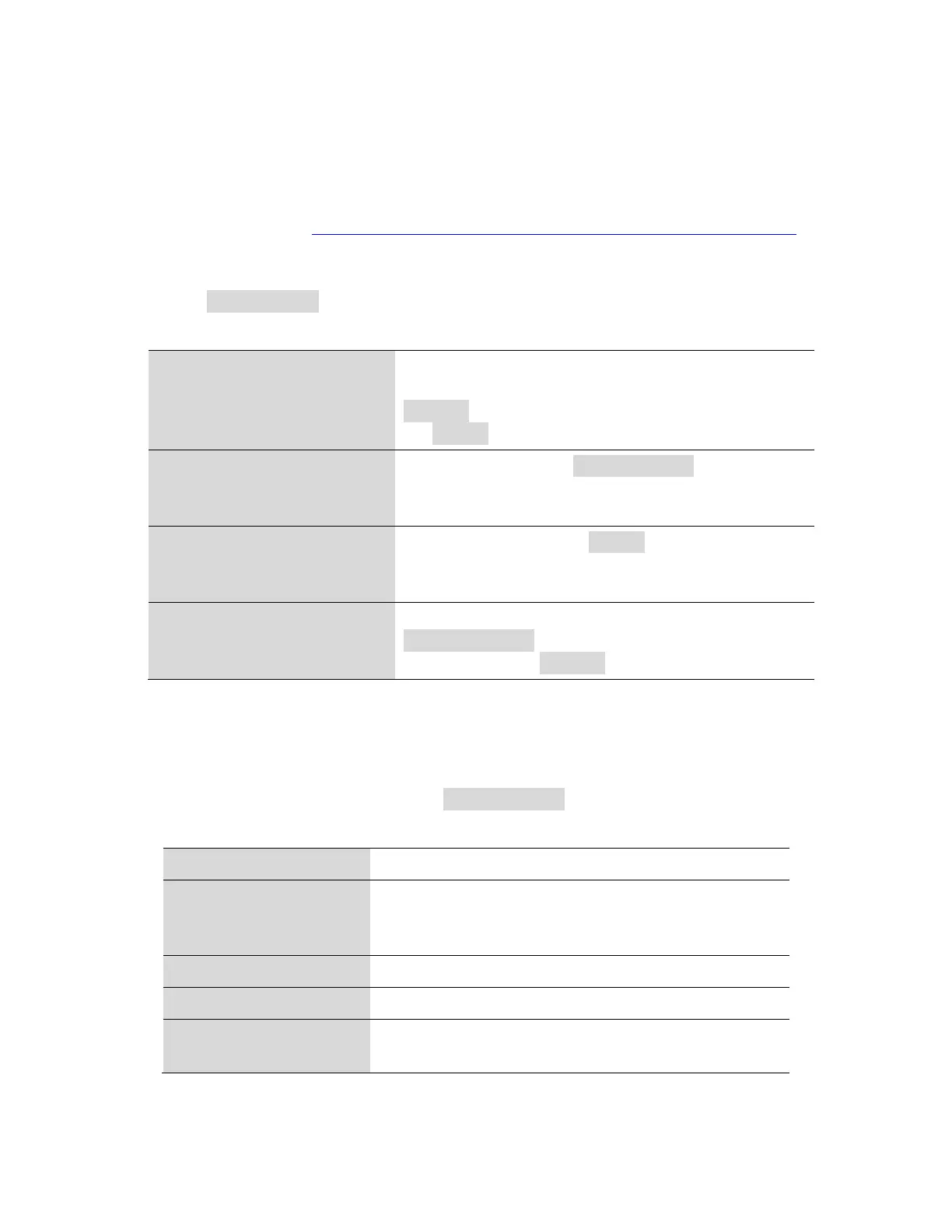
Table 3: Standard ROS Nodes
Topics
You can view all topics that are active using rostopc list. Some of the base topics are listed
in Table 4.
Kinematic motion commands to Husky
Reports how frequently Husky has received
commands, useful to determine if commands were
dropped over wireless
Dead reckoning feedback from Husky
These topics provide system information to
/husky_base_diagnostic
Table 4 Standard ROS Topics
Provides raw interface between serial protocol on
Husky and ROS. Accepts motion commands on the
cmd_vel topic, and provides feedback from Husky on
the data/* topics.
Subscribes to the raw data/encoders topic and
republishes an Odometry message and tf suitable for
use with higher-level stacks like navigation.
Subscribes to other raw data/* topics and provides
standard ROS diagnostics messages, suitable for
visualization using runtime_monitor.
These nodes connect to a joystick on
/dev/input/js0 and republish joystick-originated
commands to the cmd_vel topic