DM422S USER MANUAL
www.cloudratmotor.com
When series used, the winding inductance increased. The set of drive current should be about 0.7times than
before. This is suitable for low speed required.
When parallel used, the winding inductance decreased. The set of drive current should be about 1.4times than
before. This is suitable for high speed required.
Parallel and central tapping connection mode are used by 6 leads motor:
When parallel used, all the winding connected, and the inductance was higher. This is suitable for low speed
required.
When central tapping used, half of the winding connected, and the inductance was lower. This is suitable for high
speed required.
3.4 Control signal connection
3.4.1 PUL, DIR port: connection for pulse command
The signal interface of standard DM series drive is switch.
The upper controller can be the pulse signal generating device, such as PLC, MCU, control card and controller.
The pulse level that DM 556S drive can be used: 3.3V-24V (no need to connect resistor)
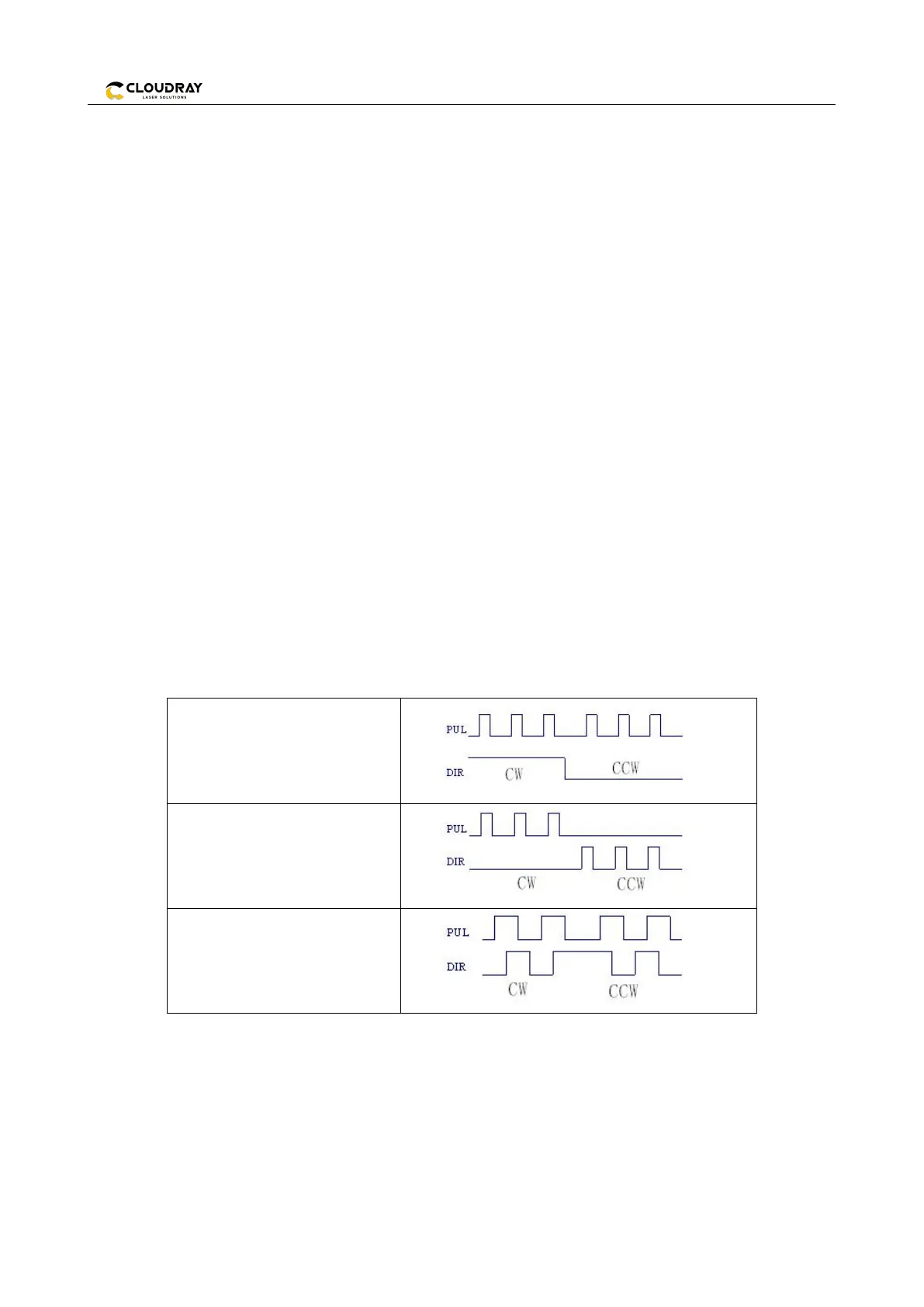
Pulse&Direction(PUL + DIR)
3.4.2 ENA port: used to enable or disable
When the default optocoupler is off, the driver outputs current to the motor. When the internal optocoupler is
turned on, the driver will cut off the current of each phase of the motor to make the motor free. At this time, the
step pulse is not responded.
The ENA input can be used to restart the drive when the motor is in an error state. First, the existing fault should