Comau Robotics Product Instruction
18
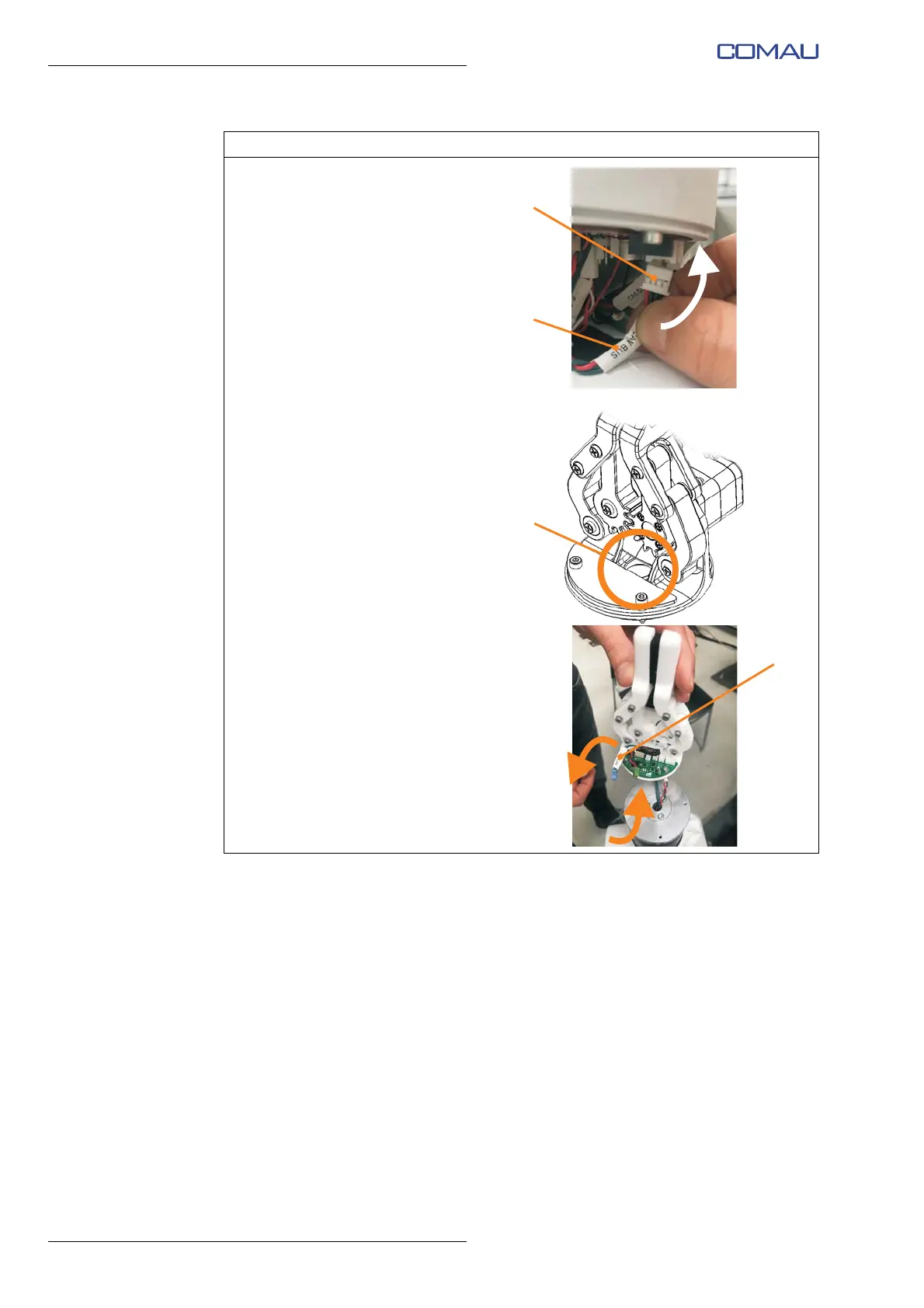
E.DO GRIPPER INSTALLATION
h. Connect the other end of the
CAN network connection cable
and power supply cable E to the
connector F of the last Robot
joint electronic board (PCB)
(the same connector from
which at step e. terminating
resistor was removed).
i. Insert the end with 2 connectors
D (CAN SUPP and CAN SIGN)
of the CAN network connection
cable in the hole G present at
the e.DO Gripper base.
Operating procedure (Continued)