Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Menu 0
Running
the motor
Optimisation Macros
Advanced
Parameters
Technical
Data
Diagnostics
UL Listing
Information
164 Unidrive User Guide
www.controltechniques.com Issue Number: 9
* The range of Pr 13.01 is ±16,384, where 16,384 equals 1 whole
revolution. The parameter increments in steps of
1
/
16384
parts of a
revolution.
** The ranges of Pr 13.11 and Pr 13.12 are 0 to 4095 and 0 to 200
respectively. 200 is equivalent to a part of a revolution and 4095 equals 1
whole revolution. These parameters increment in steps of
1
/
4096
parts of
a revolution.
*** For more information, see section 10.22.8 Position loop modes on
page 188.
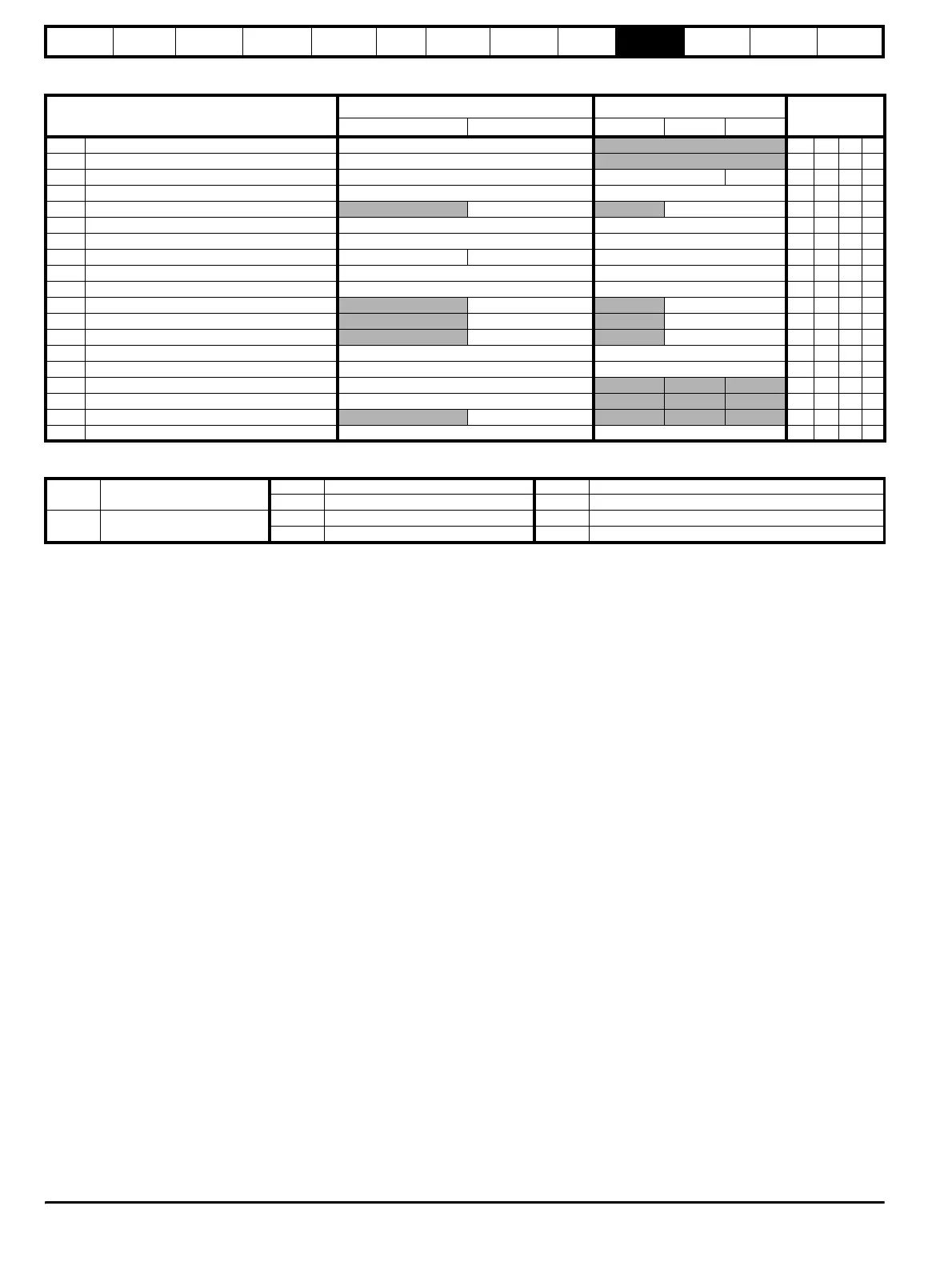
Parameter
Range(
Ú)Default(Ö)
Type
OL CL OL VT SV
13.01
Position-loop error ±16,384* RO Bi P
13.02 Reference-encoder input ±100.0 % RO Bi P
13.03 Maximum reference speed 0 to 30,000 rpm 1,500 3,000 RW Uni
13.04 Reference-encoder scaling 0.000 to 4.000 1 RW Uni
13.05 Percentage input select 0 or 1 0RWBit
13.06 Reference input destination parameter Pr 0.00 to Pr 20.50 0RWUniRP
13.07 Reference-encoder ratio 0 to 4.000 1 RW Uni
13.08 Position-loop mode selector*** 0 to 2 0 to 6 0 RW Uni
13.09 Position-loop gain 0 to 4.000 0.1 RW Uni
13.10 Positioning speed-limit 0 to 250 rpm 150 RW Uni
13.11 Orientation position reference 0 to 4095** 0RWUni
13.12 Orientation acceptance window 0 to 200** 20 RW Uni
13.13 Encoder sample time 0 to 5.0 ms 4.0 RW Uni
13.14 Reference revolution counter reset 0 or 1 0 RW Bit
13.15 Feedback revolution counter reset 0 or 1 0 RW Bit
13.16 Reference-encoder revolution counter 0 to 16,384 revolutions RO Bi P
13.17 Feedback-encoder revolution counter 0 to 16,384 revolutions RO Bi P
13.18 Orientation complete indicator 0 or 1 RO Bit P
13.19 Reference feedback invert 0 or 1 0 RW Bit
RO Read Only parameter
Uni Unipolar variable parameter R Reset required for new value to take effect
Bi Bipolar variable parameter S New parameter-value saved at power-down
RW Read / Write parameter
Txt Text variable parameter P Protected; forbidden as destination parameter
Bit Bit parameter FLC Full-load current (max. continuous), Pr
11.32 {0.33}