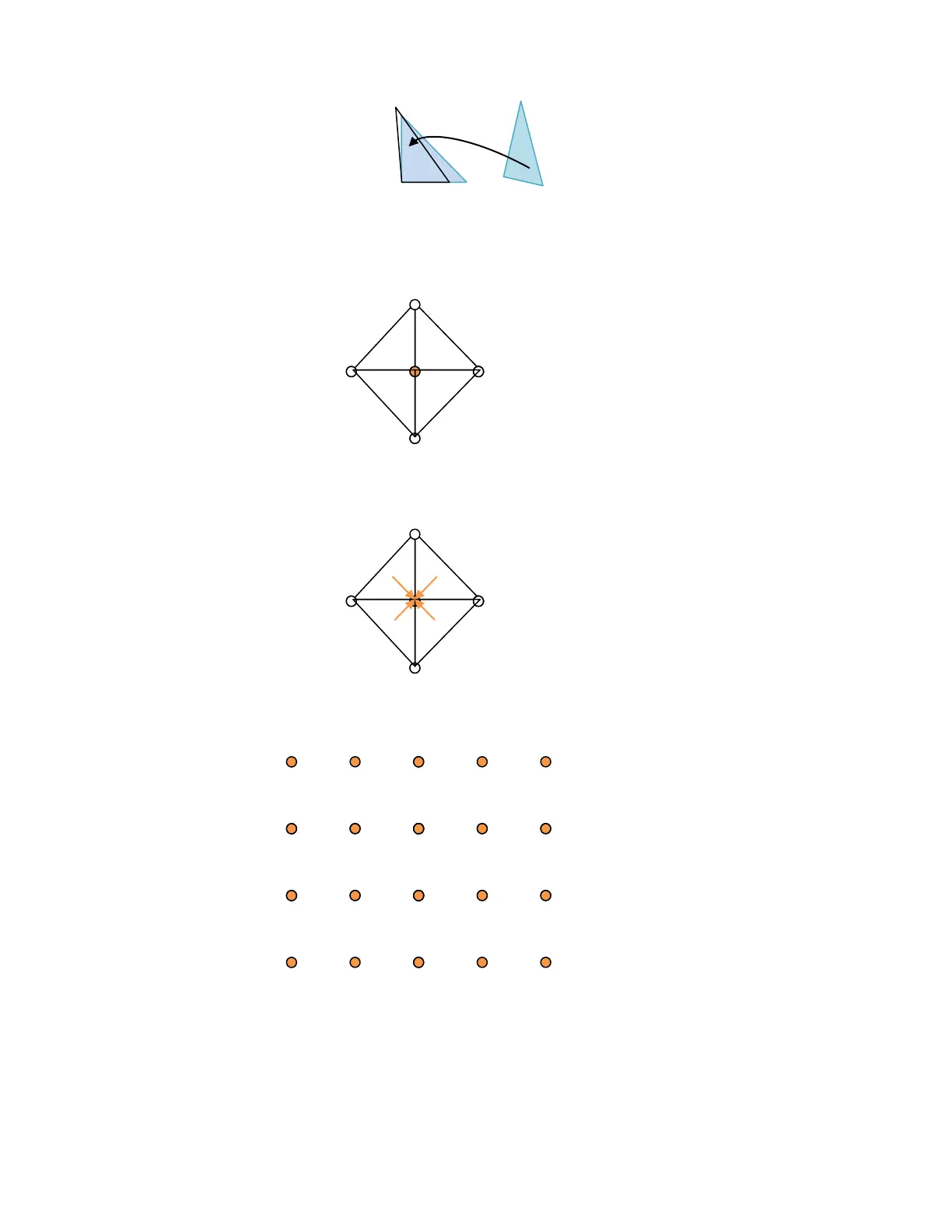
Rigid body motion is easy to remove at this point:
The remaining deformation of the triangle gives us exactly enough data to compute a single, constant strain tensor for this
triangle. We repeat this for each triangle:
Since we want a strain for each existing data point, we interpolate from the surrounding strains:
We repeat this process for each point until we have a strain tensor at each initial data point.
 Loading...
Loading...