PMAC Quick Reference Guide
90 Appendix D – PMAC Program Command Specifications
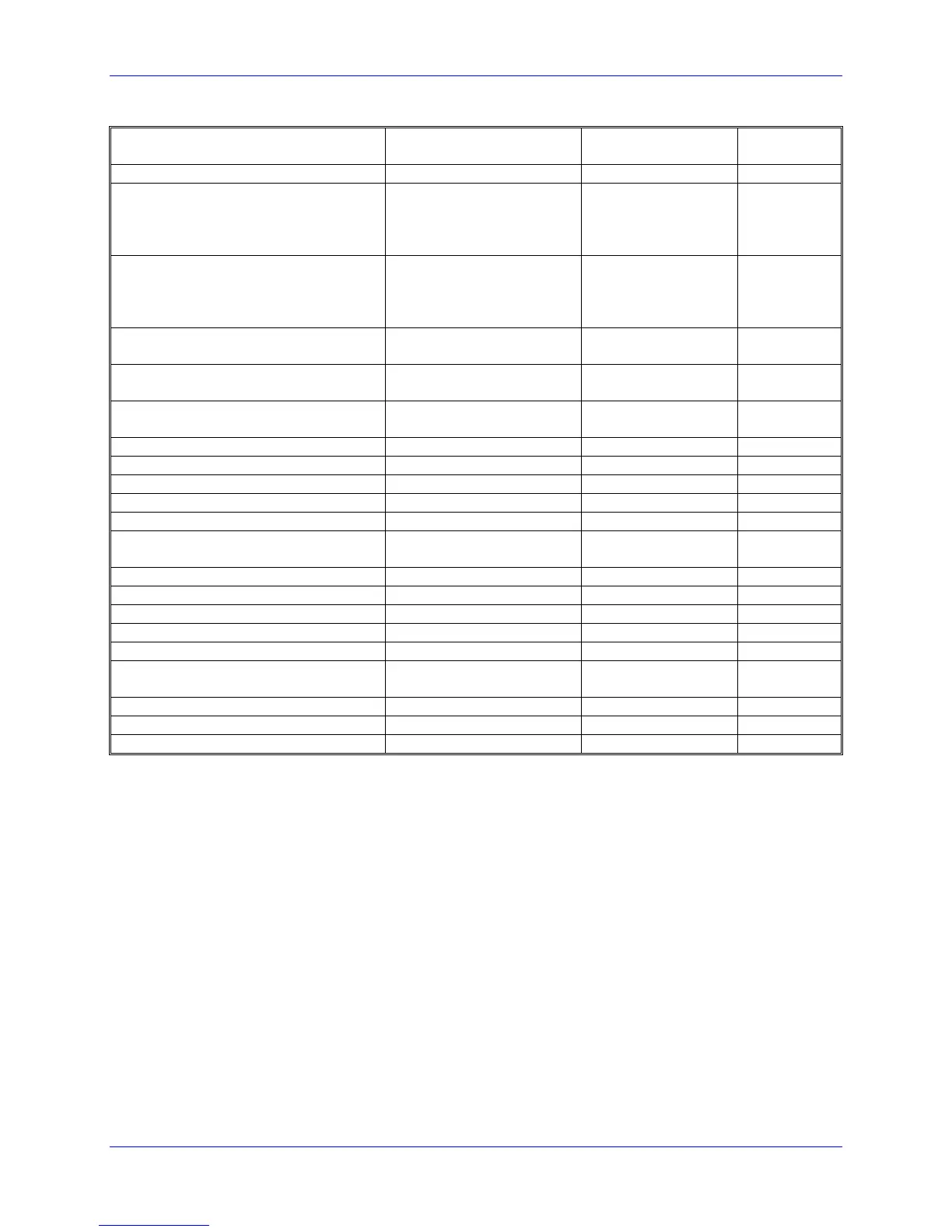
Return From Subroutine Jump/End Main
Program
RETURN RET Motion
Program
Spindle data command S{data} PROG / ROT
Cause PMAC to Send Message
SEND"{message}"
SENDS"{message}"
SENDP"{message}"
PROG / ROT /
PLC
Cause PMAC to Send Control Character
SEND^{letter}
SENDS^{letter}
SENDP^{letter}
PROG / ROT /
PLC
Put program in uniform cubic spline
motion mode
SPLINE1 PROG / ROT
Put program in non-uniform cubic spline
motion mode
SPLINE2 PROG / ROT
Stop program execution STOP Motion
Program
Tool Select Code (T-Code) T{data} PROG / ROT
Set Acceleration Time TA{data} PROG / ROT
Initialize selected transformation matrix TINIT PROG / ROT
Set Move Time TM{data} PROG / ROT
Set S-Curve Acceleration Time TS{data} PROG / ROT
Select active transformation matrix for X,
Y, and Z axes
TSELECT{constant} PROG / ROT
U-Axis Move U{data} PROG / ROT
V-Axis Move V{data} PROG / ROT
W-Axis Move W{data} PROG / ROT
Suspend program execution WAIT PROG / ROT
Conditional looping WHILE ({condition}) Motion or PLC
Conditional looping WHILE ({condition})
{action}
PROG / ROT
X-Axis Move X{data} PROG / ROT
Y-Axis Move Y{data} PROG / ROT
Z-Axis Move Z{data} PROG / ROT
 Loading...
Loading...