DVP-ES2/EX2/EC5/SS2/SA2/SX2/SE&TP Operation Manual - Programming
5. TarSpeed sets the target output speed (Unit: Hz). The input value is a signed 32-bit value
within the range of -200,000 (-200K) ~ 200,000 (200K). You can modify the target frequency
any time after the instruction is enabled and the PU module will automatically switch to the
newly set target frequency after outputting a full pulse.
6. When TarSpeed is a positive number (>0), it means that the “positive direction” output point is
Off. When TarSpeed is a negative number (<0), it means that the “negative direction” output
point is On. When TarSpeed is 0, it means that the output will be paused after the being
executed pulse is output fully.
7. The instruction does not support the function of acceleration and deceleration. Use the
DPUDRI instruction instead if you need the function of acceleration and deceleration.
8. The instruction can be used for the speed change. While the instruction is being executed, you
can change the value of TarSpeed so as to change the output speed. When the setting value
exceeds the maximum frequency, the instruction would be executed at the maximum
frequency. But changing the speed would not change the direction. If the direction is to be
changed, set the value of TarSpeed to 0 first and then modify the target speed.
9. When the outputs have reached the pulse number specified by TarPulse, the Done flag
changes to ON. The Done flag need be cleared by manual. The instruction sets the
completion flag to ON only when the output is completed.
10. The instruction can be used with the software and hardware limit points. When the limits are
triggered, the output stops immediately and the Error flag changes to ON.
11. If any error occurs as the instruction is in process of the output, the Error flag changes to ON.
Refer to the error codes ErrCode shows for the trouble shooting.
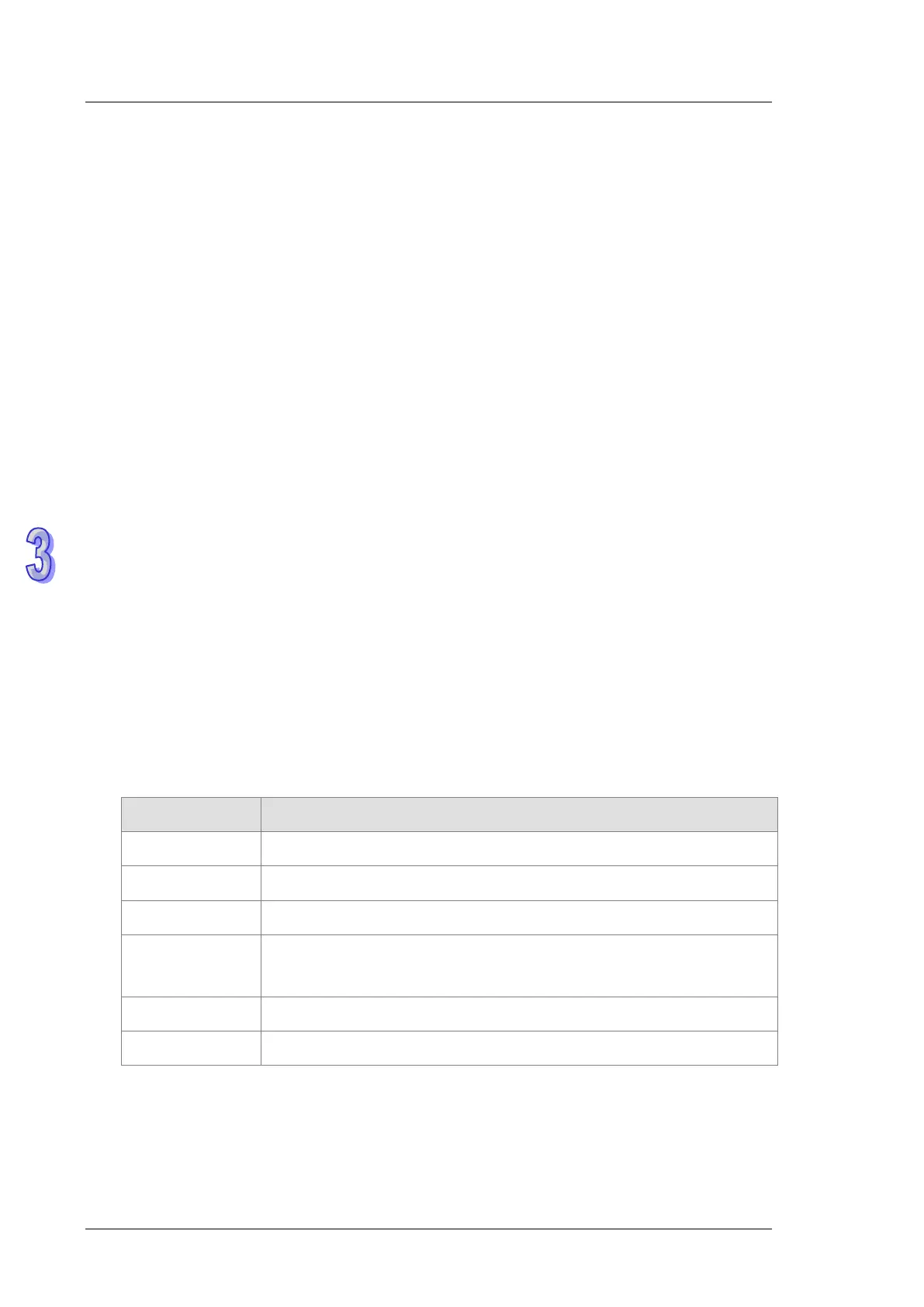
The error codes that ErrCode shows are listed in the following table.
Error code Description
16#1400 The module does not support the function.
16#1402 There is no response from the module; communication timeout occurs.
16#1403 There is no such output axis number in the PU module.
16#1405
The output axis specified by the PU module is outputting data. It is not
allowed to specify the output repeatedly.
16#1406 PU module stops Output pulse when the positive limit is reached.
16#1407 PU module stops Output pulse when the negative limit is reached.