Chapter 15 CANopen Overview C2000 Plus
15-20
15-3-5 Control DI / DO / AI / AO through CANopen
To control the DO and AO of the motor drive through CANopen, follow the steps below:
1. Define the DO to be controlled by CANopen. For example, set Pr.02-14 to control RY2.
2. Define the AO to be controlled by CANopen. For example, set Pr.03-23 to control AFM2.
3. Control the Index mapped by CANopen. To control DO, use control index 2026-41. To control AO,
you will need to control 2026-AX. To set RY2 as ON, set bit1 of Index 2026-41 = 1, then RY2
outputs 1. To control AFM2 output = 50.00%, set Index 2026-A2 = 5000, then AFM2 outputs 50%.
The following table shows the mapping of CANopen DI
/ DO / AI / AO:
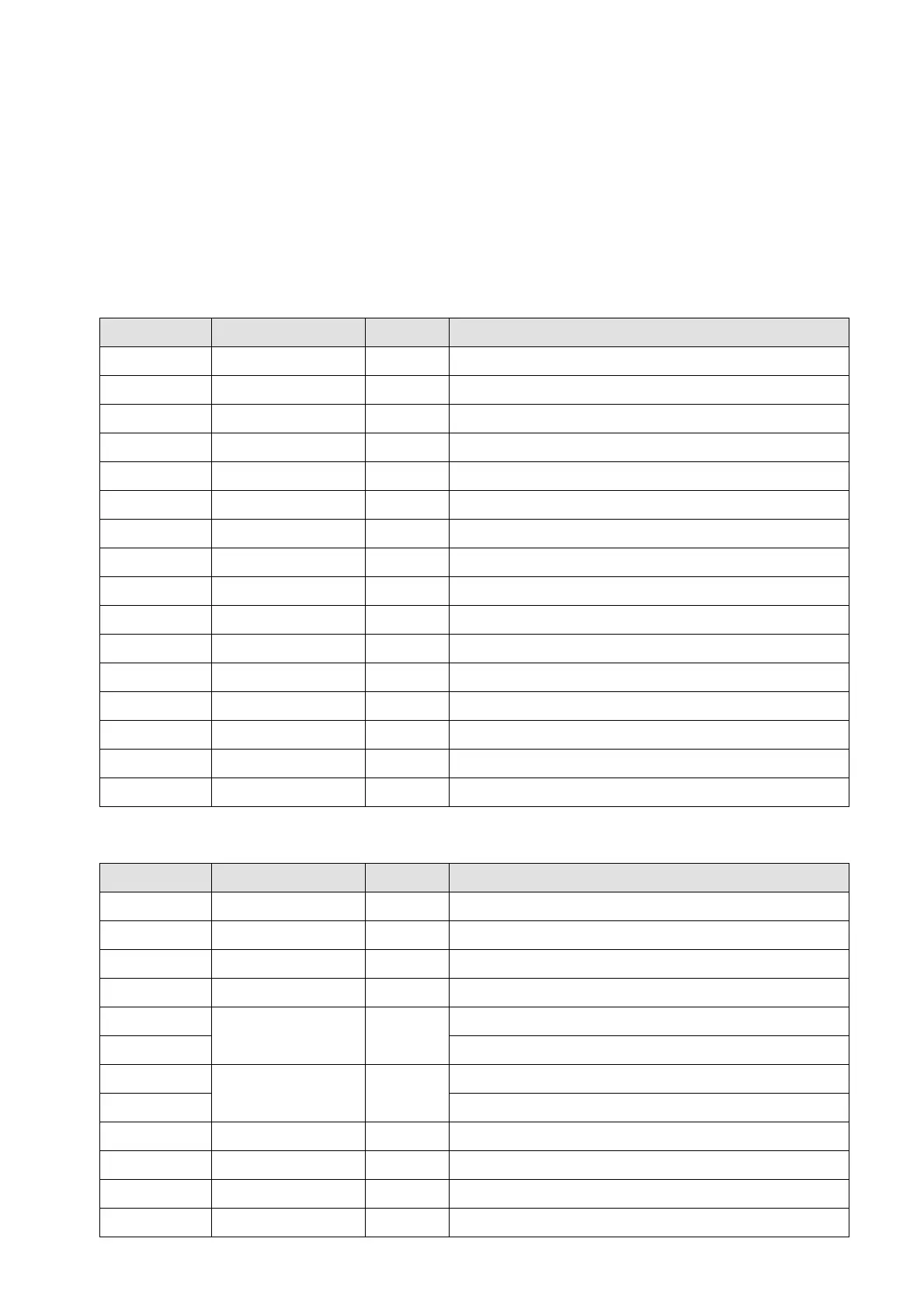
DI:
Terminal Related Parameters R/W Mapping Index
FWD == RO 2026-01 bit0
REV == RO 2026-01 bit1
MI1 == RO 2026-01 bit2
MI2 == RO 2026-01 bit3
MI3 == RO 2026-01 bit4
MI4 == RO 2026-01 bit5
MI5 == RO 2026-01 bit6
MI6 == RO 2026-01 bit7
MI7 == RO 2026-01 bit8
MI8 == RO 2026-01 bit9
MI10 == RO 2026-01 bit10
MI11 == RO 2026-01 bit11
MI12 == RO 2026-01 bit12
MI13 == RO 2026-01 bit13
MI14 == RO 2026-01 bit14
MI15 == RO 2026-01 bit15
DO:
Terminal Related Parameters R/W Mapping Index
RY1 Pr.02-13 = 50 RW 2026-41 bit0
RY2 Pr.02-14 = 50 RW 2026-41 bit1
MO1 Pr.02-16 = 50 RW 2026-41 bit3
MO2 Pr.02-17 = 50 RW 2026-41 bit4
MO10
Pr.02-36 = 50 RW
2026-41 bit5
RY10 2026-41 bit5
MO11
Pr.02-37 = 50 RW
2026-41 bit6
RY11 2026-41 bit6
RY12 Pr.02-38 = 50 RW 2026-41 bit7
RY13 Pr.02-39 = 50 RW 2026-41 bit8
RY14 Pr.02-40 = 50 RW 2026-41 bit9
RY15 Pr.02-41 = 50 RW 2026-41 bit10
 Loading...
Loading...
