20 Unidrive M300/HS30 Quick Start Guide
Issue Number: 6
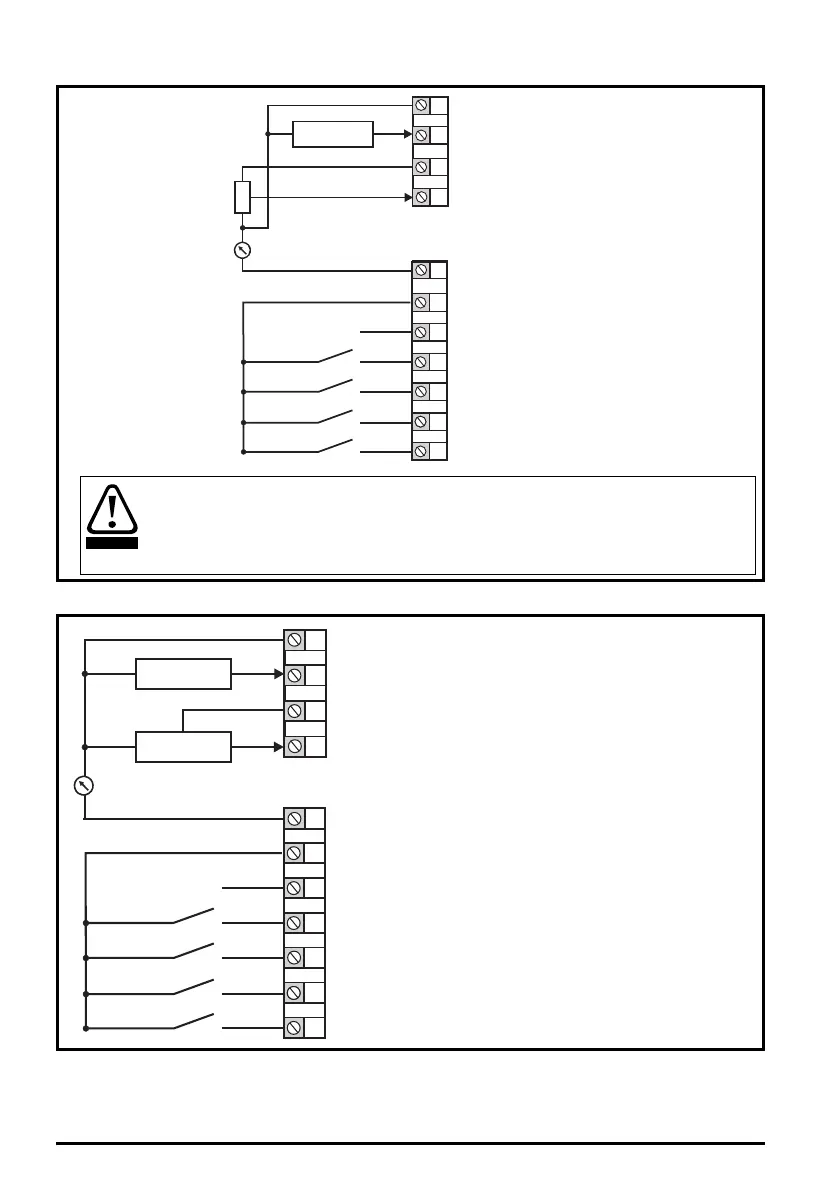
Figure 4-9 Pr 00.005 = torque (50 and 60 Hz)
Figure 4-10 Pr 00.005 = Pid (50 and 60 Hz)
1
2
0V
Current speed reference
input (AI 1)
Current speed
reference input
4
Torque reference
input (AI 2)
5
7
Analog output 1
(motor frequency)
+ 10 V output
9
10
11
Digital output
(zero frequency)
Unassigned
12
13
14
Run reverse
Run forward
Torque mode select
+ 24 V output
10k
When torque mode is selected and the drive is connected to an unloaded motor, the
motor speed may increase rapidly to the maximum speed (Pr 00.002 +10 %)
1
2
4
0V
Pid feedback
input (AI 1)
5
7
Analog output 1
(motor frequency)
+ 10 V output
9
10
11
Digital output
(zero frequency)
Unassigned
12
13
14
Run reverse
Run forward
Pid enable
+ 24 V output
4-20 mA Pid
feedback input
0-10 V Pid
reference input
Pid reference
input (AI 2)
When Pr 00.005 is set to Pid, the following
parameters may need to be adjusted:
• PID proportional gain
• PID integral gain
• PID feedback invert
• PID output upper limit (%)
• PID output lower limit (%)
Unidrive M300 Quick Start Guide English Iss6.book Page 20 Tuesday, September 22, 2015 3:21 PM

 Loading...
Loading...








