U Page 14
Digital controller RK 4004
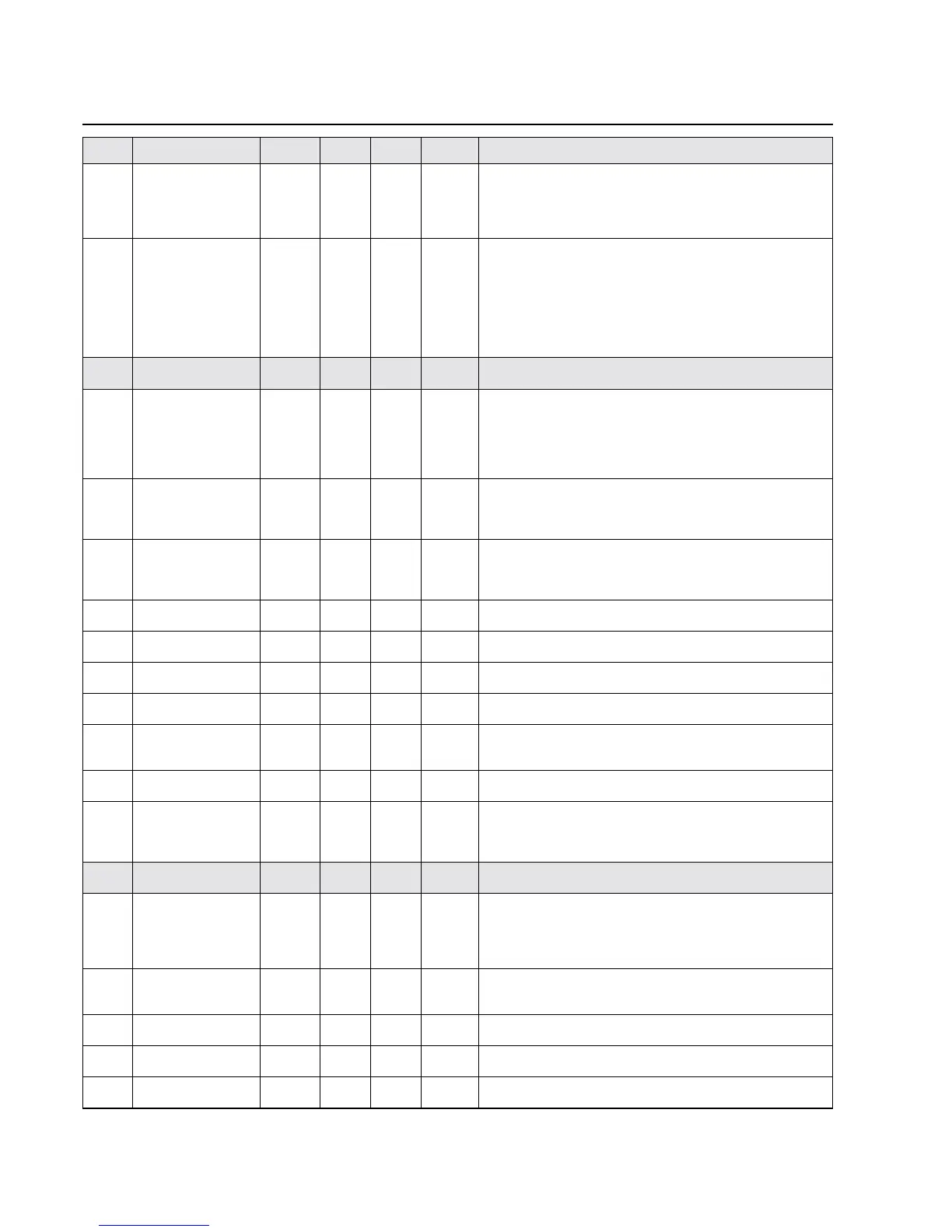
No. Name Default Min. Max. Unit Description
.1.0. osc. wave form 95 5 95 % Oscillation progression
5% = square wave
50% = trapezoidal wave
95% = delta wave
.1.1. >osc. trigger mode 2 0 7 Oscillation operation
0 (4) = operation via keyboard
1 (5) = operation via AUTO key
2 (6) = oscilation OFF
3 (7) = oscillation ON
Values in () for path-dependent oscillation
.1.2. • webedge controller Parameter title
.1.3. prop range +/- 10.0 -2000.0 2000.0 mm Guider proportional range
Web offset in mm at which the DC actuator
runs at maximum speed.
Decrease value in case of inaccurate guiding!
Increase value in case of uneven guiding!
.1.4. dual-rate width 30 10 90 % Window width in % in relation to the sensor scan range
This value is used to establish the switch point for
determing the dual rate characteristic curve.
.1.5. dual-rate level 100 0 150 % Positioning velocity reduction
This value is used to determine % motion speed at
the switch-over point.
.1.6. velocity auto 20 0 1000 mm/s Max. positioning velocity speed in automatic mode
.1.7. velocity pos 50 0 1000 mm/s Positioning velocity speed in positioning mode
.1.8. velocity jog 10 1 1000 mm/s Positioning velocity speed in jog mode
.1.9. velocity defect 1 1 1000 mm/s Positioning velocity when exceeding the set threshold
.2.0. • derated velocity 1000 mm/s Display of velocity limited by internal functions
(only active for selecting in parameter 1.1.8.)
.2.1. reserved 21 not assigned at present
.2.2. defect range ± 10.0 0.0 2000.0 mm range for detecting a web fault
if not attained switching to the set "velocity defect" speed
will be performed
.2.3. • servo configuration Parameter title
.2.4. motion direction 0 0 1 Motion effective direction
0 = normal
1 = inverted
Depends on mounting position and web direction of travel
.2.5. motion range total 0.0 0.0 3270.0 mm Total motor position range on calibration
AG positioning path must be entered prior to calibration
.2.6. positionrange + 0.0 0.0 3270.0 mm Positive motor position range
.2.7. positionrange - 0.0 -3270.0 0 mm Negative motor position range
.2.8. alarm limit % 75 0 100 % Limit value for end position early warning