U Page 37
Digital controller RK 4004
.3.8. reserved 38
Not assigned at present.
.3.9. reserved 39
Not assigned at present.
.4.0. pos. controlling
Parameter block for setting the positioning control loop.
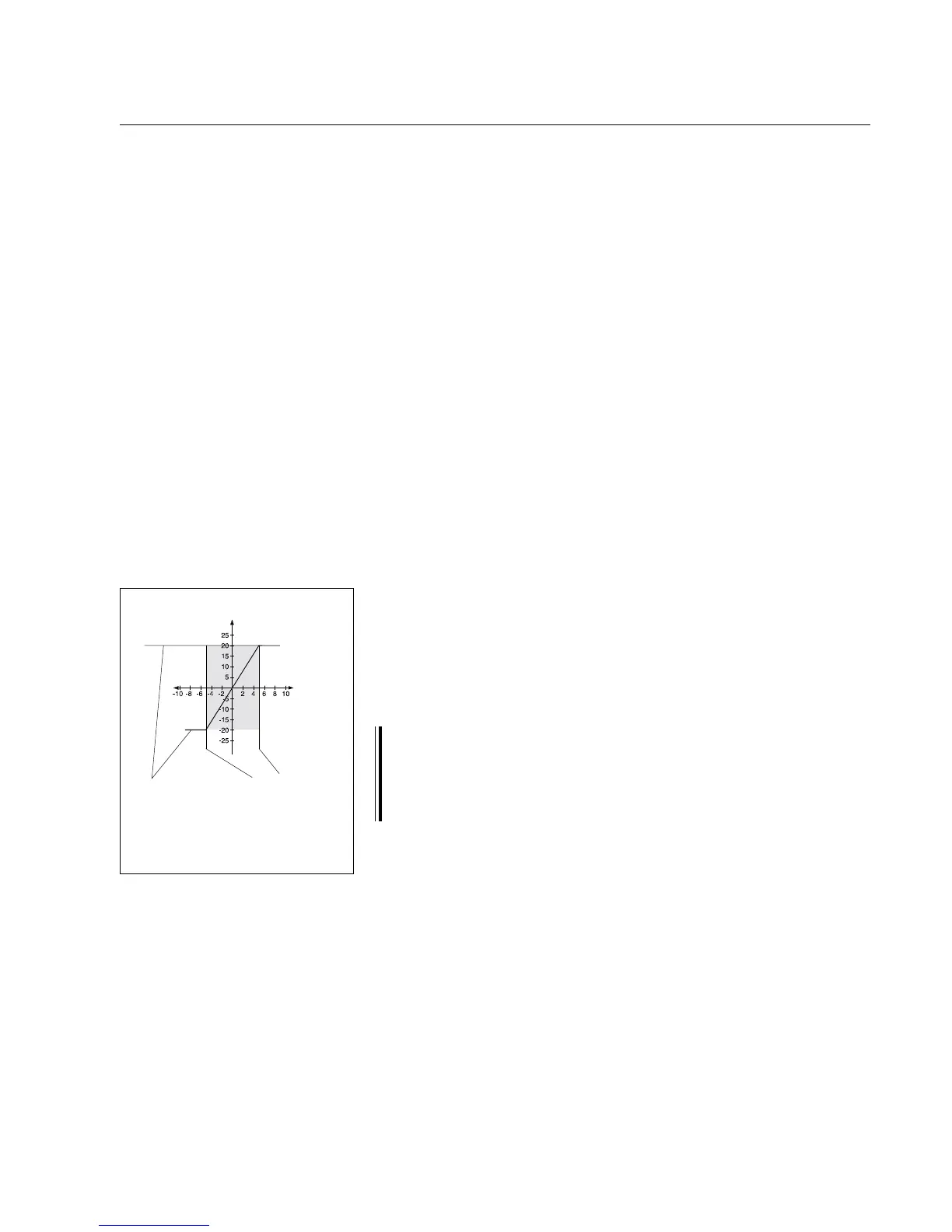
.4.1. pos prop ±
If the position error is greater than the set "position controller propor-
tional range" the correction velocity will thus correspond to the maxi-
mum positioning velocity. If the position error is within the set "positi-
on controller proportional range" a lesser positioning velocity accor-
ding to the one of the characteristic curves is produced.
Via this parameter the P component of the actuator drive position
controller is indirectly set.
Example:
A web set position deviation of 1 mm produces an actuator set positi-
on of 15 mm based on the set values (parameter .1.3. und .4.5.).
The DC actuator drive covers the first 10 mm at maximum positioning
velocity as these values are outwith the grey range. Once the 10 mm
are passed, only 5 mm remain. These 5 mm lie within the grey range
and the velocity is thus reduced linearly to 0 until the 15 mm position
range is reached.
In the case of uneven edges (textile) this parameter may be
increased to dampen the DC actuator drive position controller. The
static precision of the web guider is hereby preserved.
The value of parameter .4.1. should amount at most to half of the
sensor scanning range.
.4.2. act position
The actual position of the actuator at the outfeed, in relation to the set
center, is displayed.
.4.3. set position
The set position of the actuator at the outfeed, in relation to the set
center, is displayed.
Maximum posi-
tioning velocity
in automatic
(parameter
.1.6.)
Position con-
troller propor-
tional range
(Parameter
.4.1.)
Positioning velocity
Position
error