U Page 6
Digital controller RK 4004
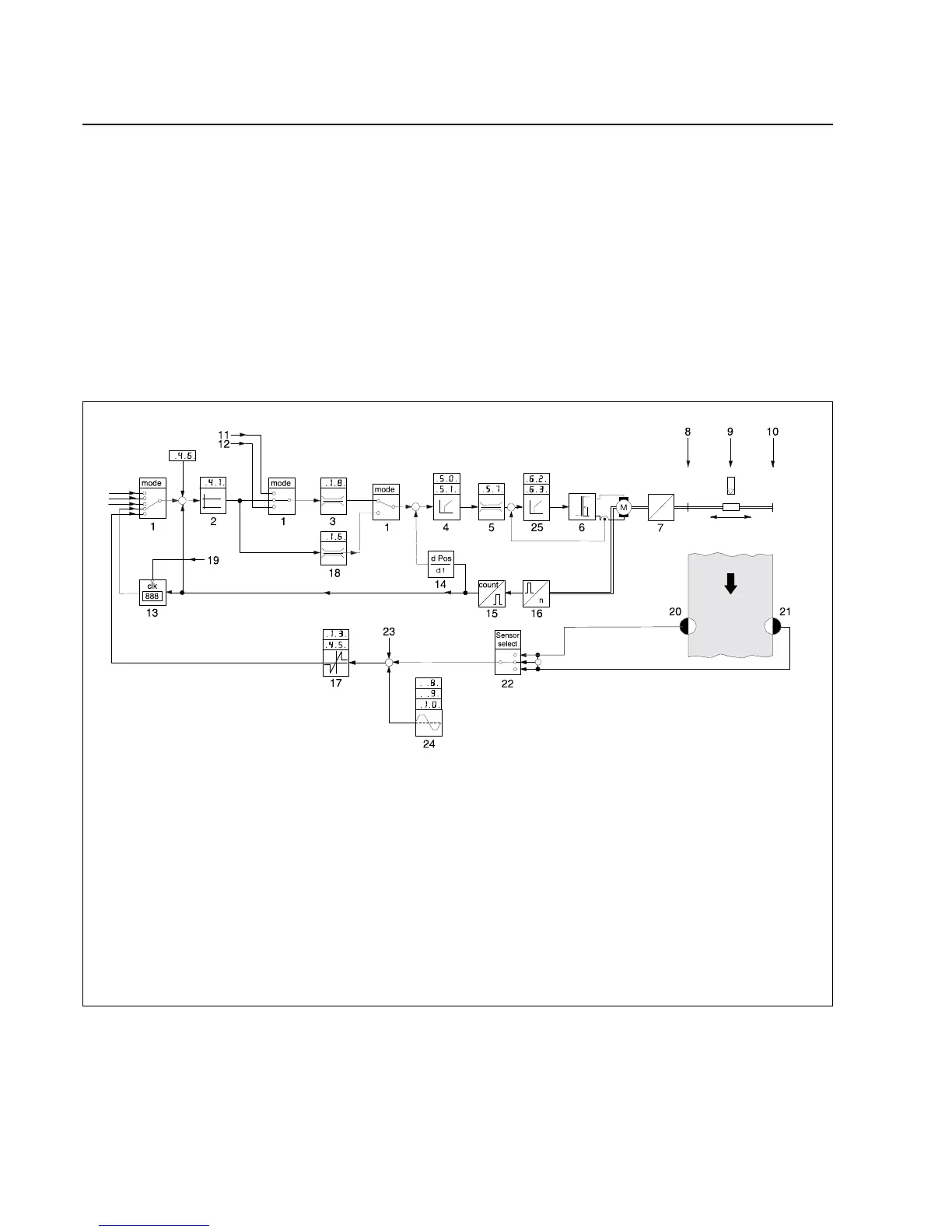
Control structure legend
1 Operating mode
2 Actuator position controller
3 Max. variable actuating speed in manual
4 Speed controller
5 Variable current controller
6 Power output stage
7 Gearing with spindle
8 Right end position
9 Center position
10 Left end position
11 Right offset
12 Left offset
13 Actual position memory
14 Actual speed value recording
15 Counter
16 Incremental encoder
17 Web position controller
18 Max. variable actuator speed in automatic
19 Memory command at stop
20 Right edge sensor
21 Left edge sensor
22 Sensor selection (right web edge, left web edge, web center)
23 Web offset
24 Oscillation generator
25 Current controller
1.6 Control structure with con-
stant controlling for inte-
gral actuators
In the case of a control structure for integral actuators the web actual
position value is compared to the required web set position value
and, in the event of a deviation, it is transmitted as a control diffe-
rence to a P position controller. The latter provides the necessary set
position value for the actuator. The current actual actuator position
value is compared to the required set position value and transmitted
as a control difference to the actuator position controller. The latter
generates the set speed value which is compared to the actual speed
value, the difference being fed to the PI speed controller which emits
a pulse width-modulated signal at the output stage.
Available integral actuators:
SWS segmented roller guider, VGA pivoting roller, BCS edge and
width spreader