-- 4 --
cga9d1ea
TECHNICAL DESCRIPTION
The A6 GMD joint tracking equipment is used for positioning and joint--tracking of
automatic welding machines with all types of joints in which there is a guide edge for the
sensor finger to follow. The equipment has been designed to suit standard ESAB slides, and
can control either one or two servo motors simultaneously.
Technical d ata
Joint tracking equipment A6 GMD
Control and operating voltage 42V AC 50--60 Hz
Power requirement 460 V A
Motor regulator, type Switched four--quadrant
Stator voltage, joystick control 40 V DC
Field voltage, separately excited motor 48 V DC
Enclosure type IP 53
Max. ambient temperature
+45_ C
Wei
0.6 kg
Remote control unit 2kg
Working range sensor, radially 360˚ 4mm
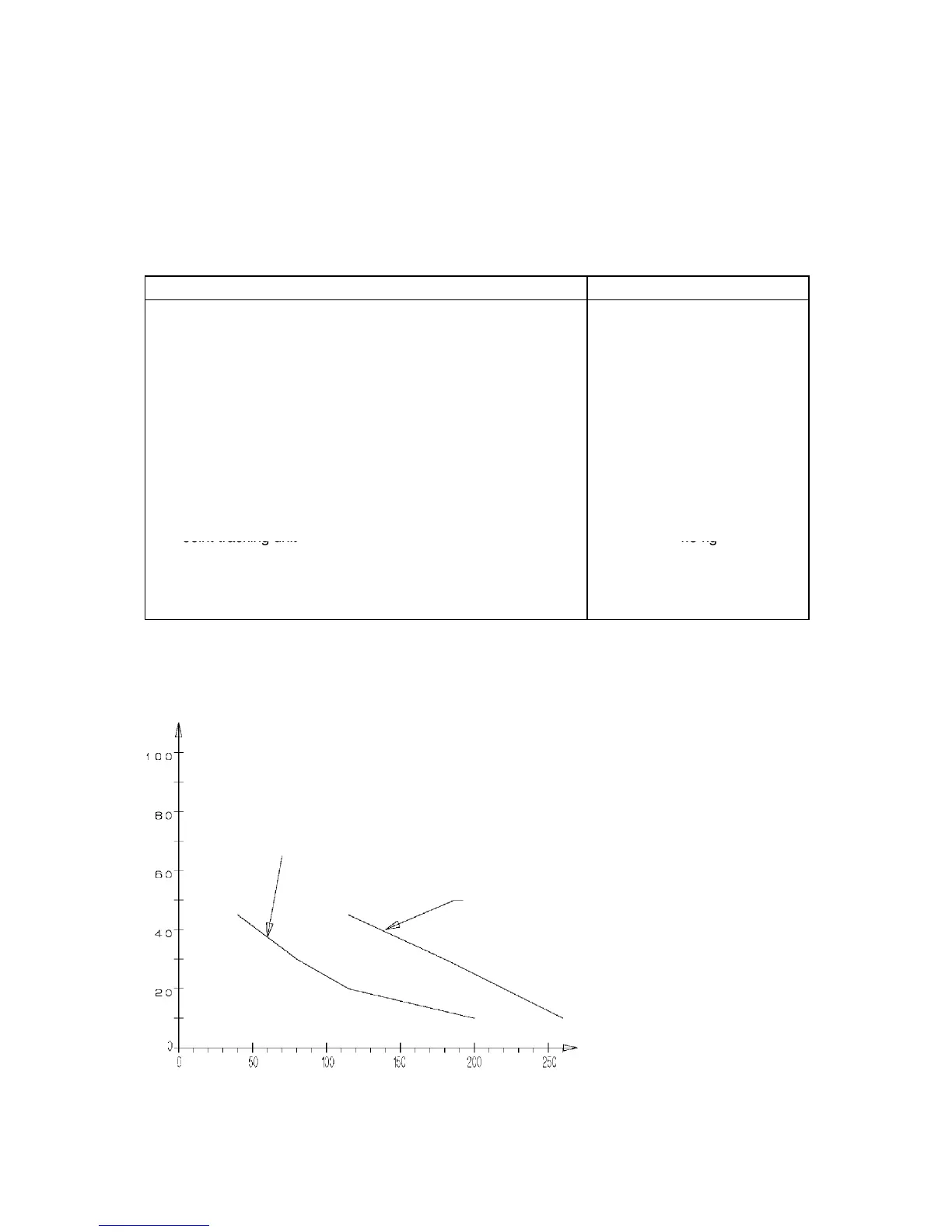
The figure below shows the working range and setting speed of the equipment.
For the A6 servo slide, see Simplified service manual no. 334 346--001.
dga9d008
Normal gearing
Reversed gearwheels
cm/min Welding speed
Welding speed/Angular deviation
Maximum angular deviation of the weld joint in relation to the preset welding speed.