www.fastech.co.kr
14. Protective Function
14.1 Alarm Type
When an alarm occurs while the controller is operating, a red LED among status display LEDs
flash and the following protective function will be displayed according to the number of LED
flash counting.
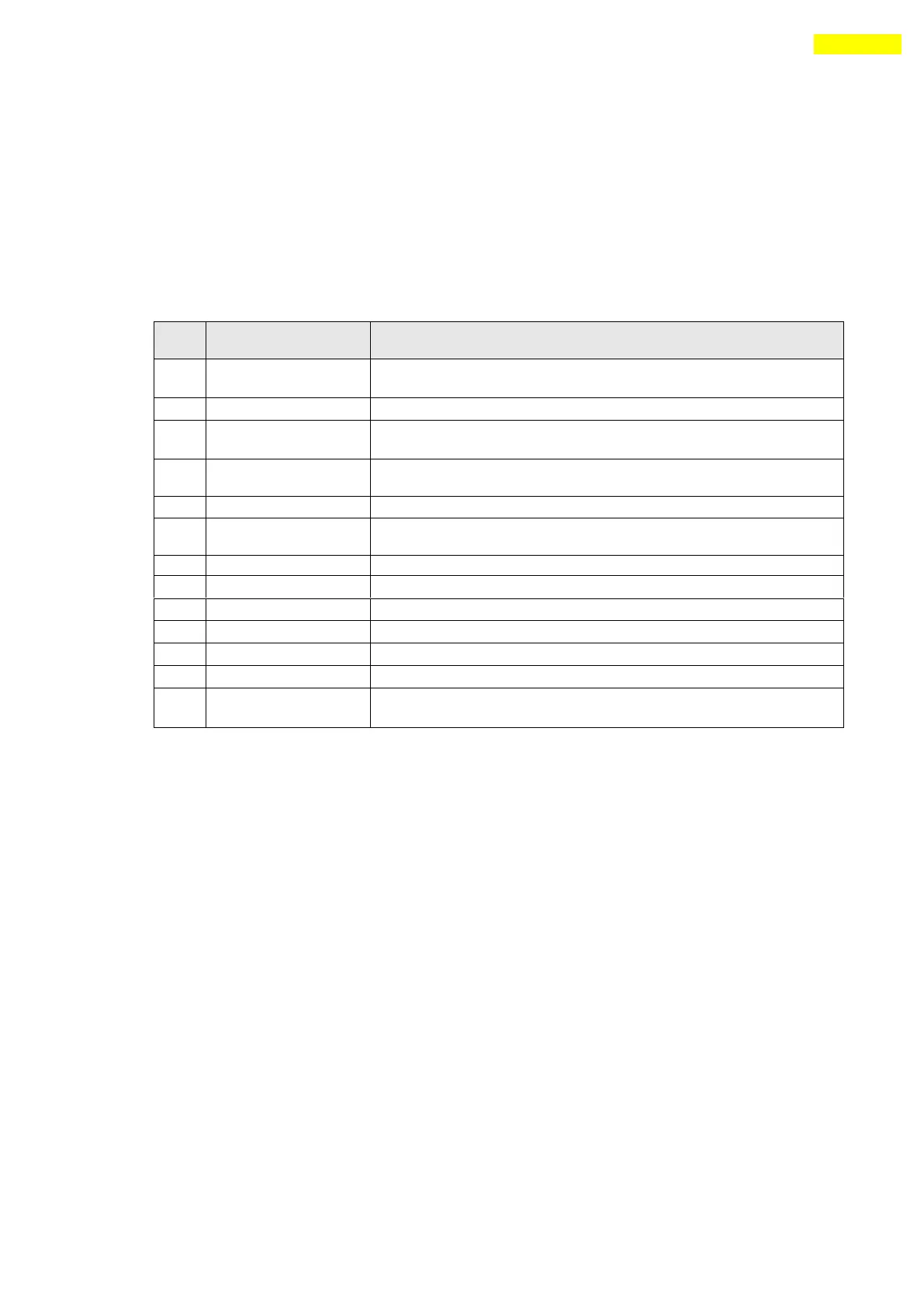
Alarm Table
*1 4.5A : EzS-NDR-20, EzS-NDR-28, EzS-NDR-42, EzS-NDR-56, EzS-NDR-60 model
9.0A : EzS-NDR-86 model
*2 Values[pulse] of parameter ‘Pos Tracking Limit[No.27]
*3 70V : EzS-NDR-20, EzS-NDR-28, EzS-NDR-42, EzS-NDR-56, EzS-NDR-60 model
90V : EzS-NDR-86 model
*4 20V : EzS-NDR-20, EzS-NDR-28, EzS-NDR-42, EzS-NDR-56, EzS-NDR-60 model
40V : EzS-NDR-86 model
*6 Values[pulse] of parameter ‘Pos. Error Overflow Limit[No.33]
14.2 Acquiring Alarm Information
When an alarm occurs, the motor become Servo OFF and then stops by free run and at the same
time displays alarm message.
Also, ‘AlarmBlink’ signal repeats On/Off according to the timing as illustrated below. The
red LED flash every 0.5 second in accordance with alarm number and wait for 2 seconds. And
then red LED flash repeatedly until inputting ‘AlarmReset’signal.
(Example) Alarm 3: ‘AlarmBlink’display signal occurred when the step-out is occured.
The current through power devices in inverter exceeds the limit
value *1
Command speed for motor exceeds 3300[rpm].
Position error value is higher than specified value*1 in
position command status . *2
The motor is continuously operated more than 5 second under a
load exceeding the max. torque.
The internal temperature of the drive exceeds 85℃.
Over regeneratived
voltage
Back-EMF more than limit value. *3
The connection of drive and motor is defective.
The connection of drive and encoder is defective.
The power supplied to the motor is less than low limit value.*4
After operation is finished, a position error occurs.
Drive system is halted(Watch Dog Timer).
Read/Write error on ROM device in drive system.
Position error value is higher than specified value*1 in motor
stop status. *6