www.fastech.co.kr
Integral
Part’s Time
Constant*
Integral
Part’s Time
Constant*
* The above value is not the actual value used inside the drive
but the relative value.
Inpos Value :
Sets the output condition of the in-position finish signal. After
position command pulse is finished, when the position deviation
from target position is within ‘Inpos Value’, this mode displays
in-position finish signal.
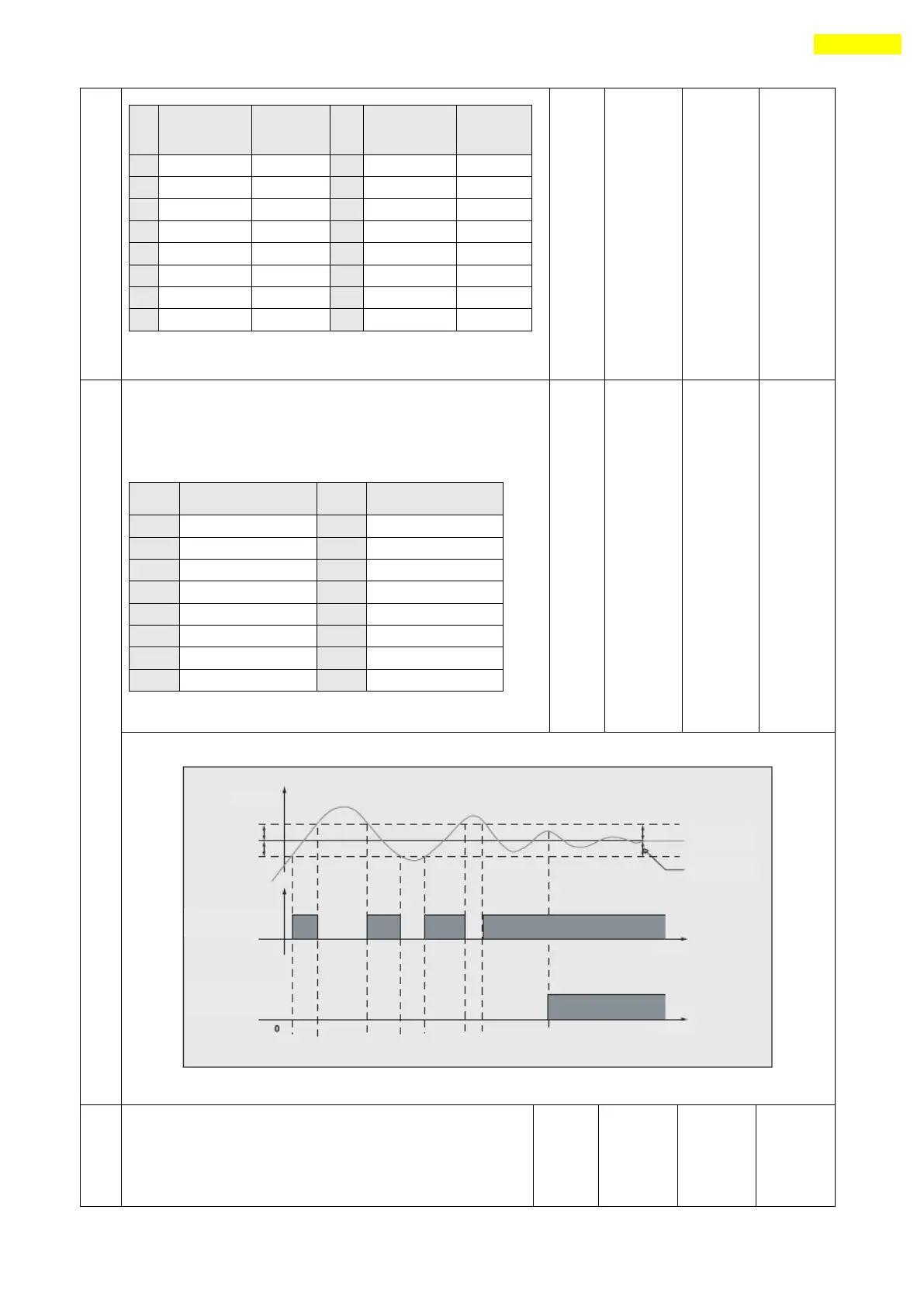
In-position [pulse]
Fast Response
In-position [pulse]
Accurate Response
Fast response and accurate response can be controlled as illustrated below.
Pos Tracking Limit :
Acts to protect the motor and the drive. While the motor is
run, when ‘Position Error’ is greater than this setting
value, this mode generates an alarm to stop a flow of
electricity to the motor and then set it to Servo OFF.
 Loading...
Loading...
