3570 Series
15
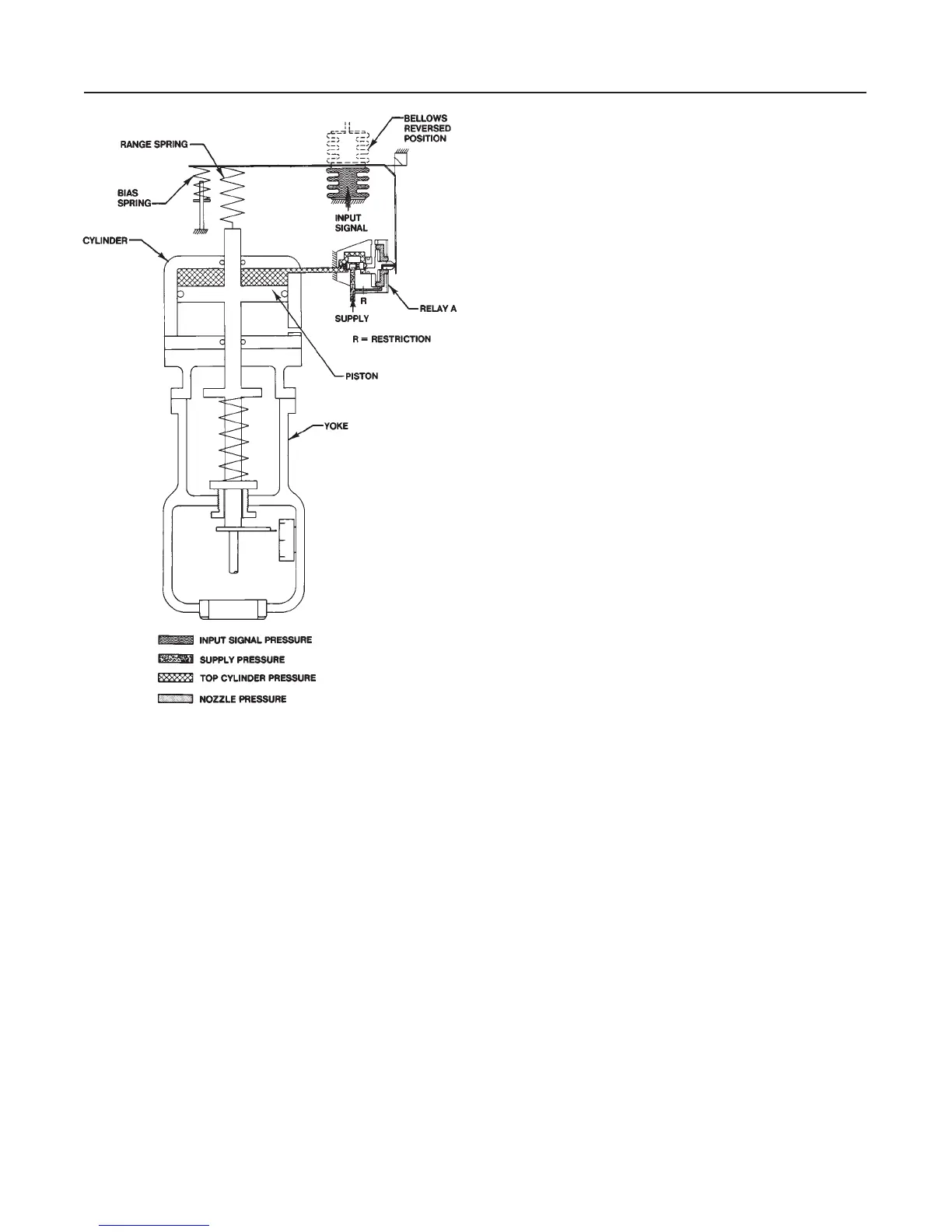
Figure 8. Schematic Diagram of T
ype 3572 Positioner with a
T
ype 472 Pneumatic Piston Actuator
CR4006-A
A1084-1/IL
Type 472 pneumatic piston actuator. For the Type
3576 positioner, the principle of operation is identical
to the Type 3572 positioner but the actuator can be a
direct or reverse acting pneumatic diaphragm actuator.
The pneumatic output signal from a control device is
piped to the positioner bellows. For explanation pur-
poses, assume this signal has increased. The bellows
expands and moves the beam, which pivots around a
fixed point and covers the relay nozzle. The nozzle
pressure in the relay increases due to the restriction
created by the beam covering the nozzle. Through
relay action, the pressure above the piston overcomes
the force exerted by the actuator spring, and the pis-
ton moves downward. This changes the valve plug
position.
In the Type 3572 positioner, piston movement is fed
back to the beam by means of a range spring, which is
connected to the beam and the piston rod extension.
As the piston rod extension moves downward, the
range spring is extended until the torque of the beam
balances the torque exerted by the instrument bellows.
In the Type 3576 positioner, the feedback is provided
to the range spring by a wire that is connected to the
actuator-valve stem connector.
As the input signal decreases, the reverse action
takes place. The bellows contracts, and as the beam
pivots, it uncovers the relay nozzle. Through relay ac-
tion, the pressure on top of the piston decreases, and
the force of the actuator spring moves the piston up-
ward.
Type 3573 and 3577 Valve Positioners
Refer to the schematic diagram in figure 9, which
shows the Type 3573 positioner mounted on a Fisher
Type 473 pneumatic piston actuator. For the Type
3577 positioner, the principle of operation is identical
to the Type 3573 positioner, but the actuator can be
direct or reverse acting.
The pneumatic output signal from a control device is
piped to the positioner bellows. For explanation pur-
poses, assume this signal has increased. The bellows
expands and moves the beam, which pivots around a
fixed point and uncovers the relay nozzle. The nozzle
pressure decreases due to the uncovering of the
nozzle by the beam. Through relay action, the pres-
sure to the underside of the piston decreases. The
force exerted by the actuator spring overcomes the
force of the pressure below the piston, and the piston
moves downward. This changes the valve plug posi-
tion.
In the Type 3573 positioner, piston movement is fed
back to the beam by means of a range spring, which is
connected to the piston rod extension. The downward
movement of the piston rod extension extends the
range spring until the torque of the beam balances the
torque exerted by the instrument bellows.
In the Type 3577 positioner, feedback is provided to
the range spring by a wire that is connected to the ac-
tuator-valve stem connector.
As the input signal decreases, the reverse action
takes place. The bellows contracts, and as the beam
pivots, it covers the relay nozzle. Through relay action,
the pressure on the underside of the piston increases
to overcome the force exerted by the actuator spring,
and the piston moves upward.