Patch for OS 2021-10-30 and Later.
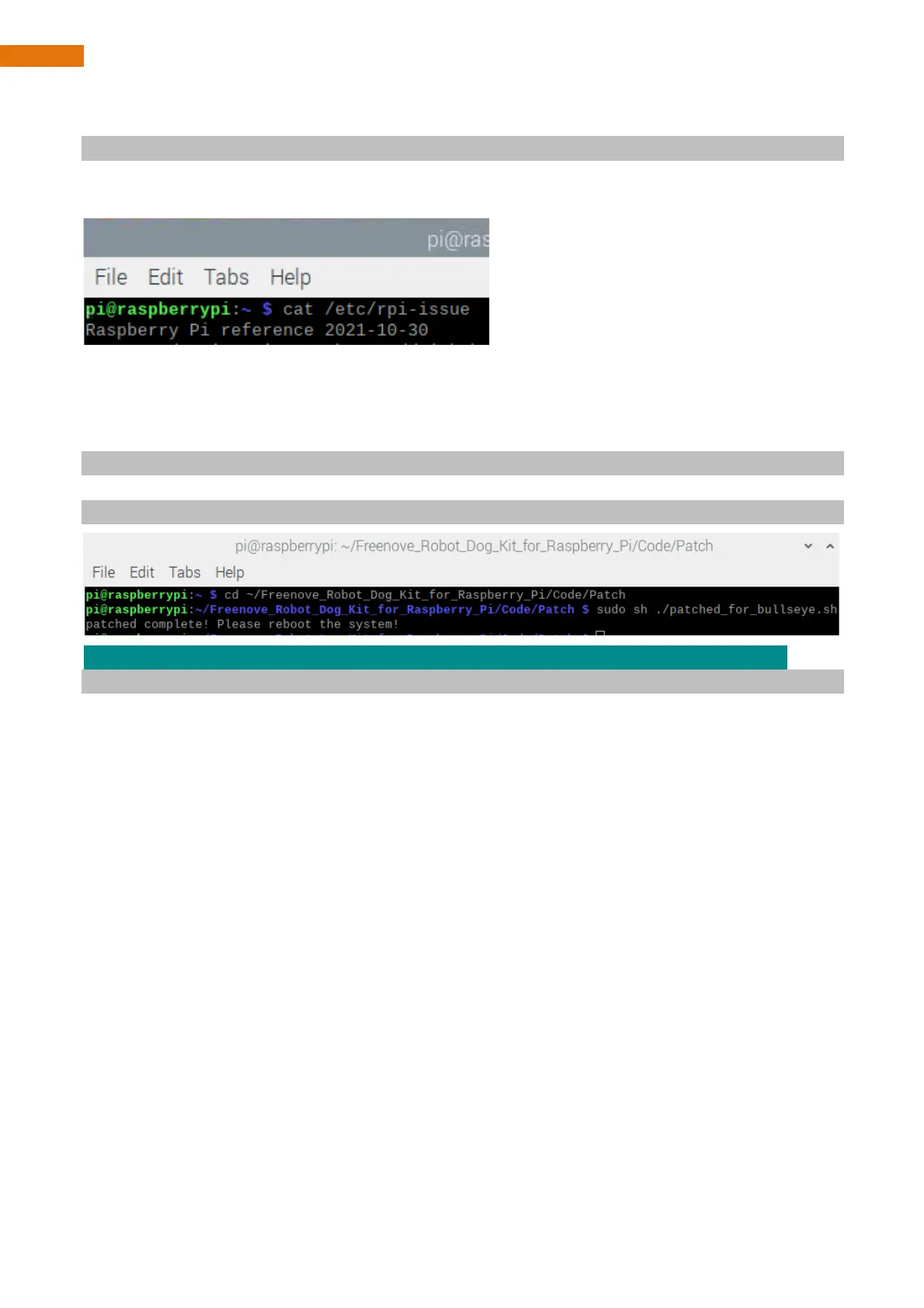
cat /etc/rpi-issue
If the result is 2021-10-30, execute following step.
If the result is earlier than 2021-10-30, skip this section.
Open the terminal and enter the following command.
1. Execute following commands to enter directory of “Patch”.
cd ~/Freenove_4WD_Smart_Car_Kit_for_Raspberry_Pi/Code/Patch
2. Run
sudo sh ./patch_for_bullseye.sh
If there is “patched complete!”, just ignore “/opt/vc/lib/libmmal.so doesn’t exist” and move on.
sudo nano /boot/config.txt
1 Add # before camera_auto_detect=1 # camera_auto_detect=1
2 Add f in dtoverlay=vc4-kms-v3d dtoverlay=vc4-fkms-v3d
3 Add following in the end.
start_x=1
gpu_mem=128
4 Add following in the end.
hdmi_force_hotplug=1
hdmi_ignore_edid=0xa5000080
hdmi_group=2
hdmi_mode=82
Finally press Ctrl+O, Enter, then Ctrl+X.
 Loading...
Loading...