Chapter 4 Light tracing Car
If you have any concerns, please feel free to contact us via support@freenove.com
Description
The light-tracing function of the car mainly uses a photoresistor. The car has two photoresistors located on
the left and right sides at the front to detect light
A photoresistor is a resistor based on the photoelectric effect of the semiconductor. The resistance changes
with the intensity of the incident light. With the incident light intensity increasing, the resistance decreases.
With the incident light intensity decreasing, the resistance increases.
And the change of the resistance value also causes voltage applied to the photoresistor changes. According
to the change of voltage, the position of the light to the car will be detected, and then make the car move
corresponding action to trace light.
Put your car in a darker environment.
Run program
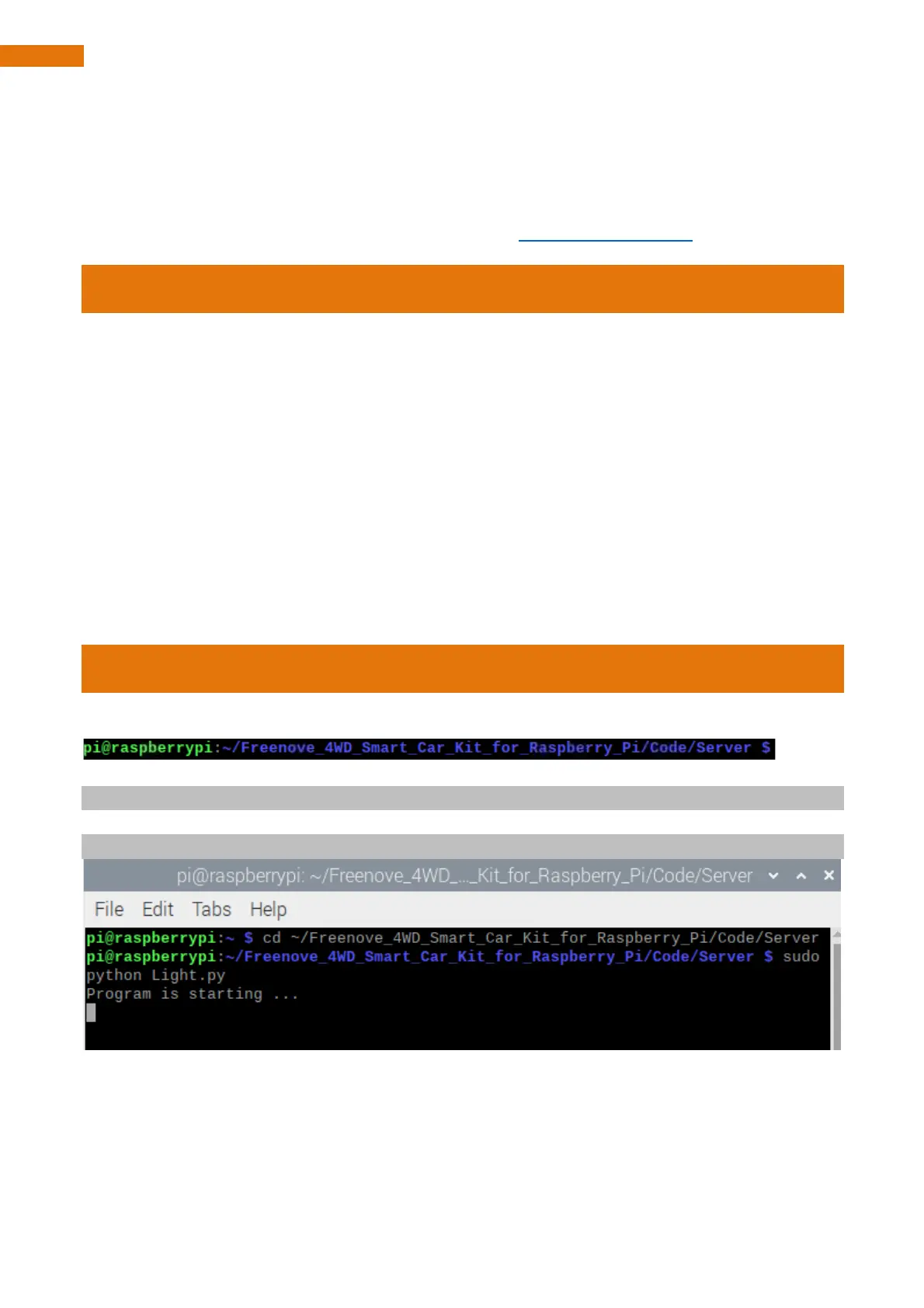
If the terminal displays the directory as below, you can directly execute the Light.py command.
1. If not, execute the cd command:
cd ~/Freenove_4WD_Smart_Car_Kit_for_Raspberry_Pi/Code/Server
2. Run Light.py:
sudo python Light.py
You can press "Ctrl + C" to end the program.
 Loading...
Loading...