Chapter 6 Infrared Line Tracking Car
If you have any concerns, please feel free to contact us via support@freenove.com
Description
The line tracing function of the car mainly uses an infrared module. When the sensor detects black line, the
corresponding LED will light up, which controls the car to move according to the value of three sensors.
Run program
If the terminal displays the directory as below, you can directly run the program.
1. If not, execute the cd command:
cd ~/Freenove_4WD_Smart_Car_Kit_for_Raspberry_Pi/Code/Server
2. Run Line_Tracking.py:
sudo python Line_Tracking.py
You can press "Ctrl + C" to end the program.
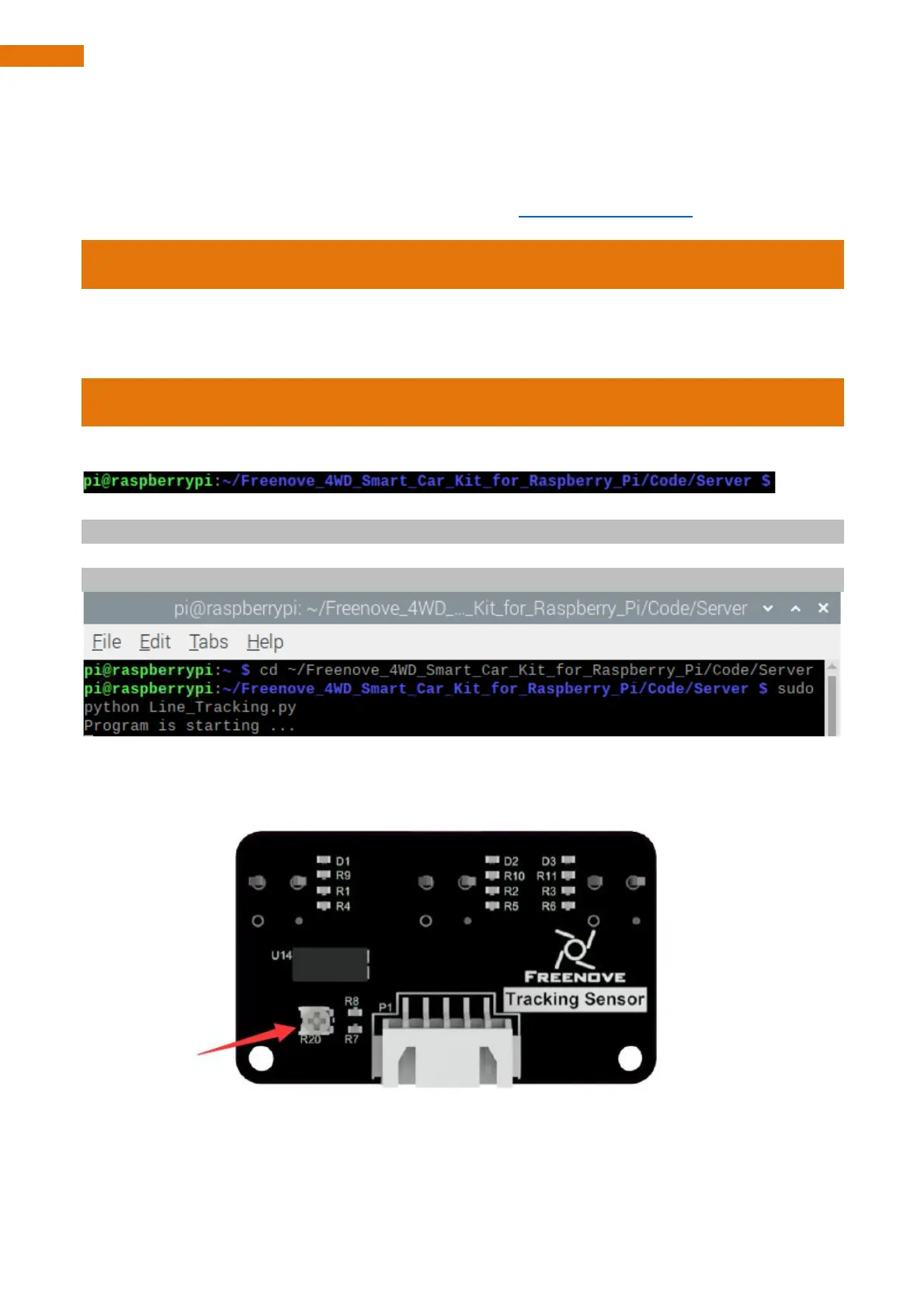
If there are issues with the test, the infrared device may need to be adjusted. The adjustment screw is on top
of the sensor.
 Loading...
Loading...