Allgemeines
Gerätekonzept Das Interface verfügt über analoge und digitale Ein- und Ausgänge und kann sowohl im
Standardmodus wie auch im Open-Collector-Modus (OC-Modus) betrieben werden. Das
Umschalten zwischen den Modi erfolgt mittels Jumper.
Zur Verbindung des Interfaces mit der Stromquelle wird mit dem Interface ein Kabel-
baum mitgeliefert. Als Verlängerung für den Kabelbaum ist ein SpeedNet-Verbindungs-
kabel verfügbar.
Zur Verbindung des Interfaces mit der Roboter-Steuerung ist ein vorgefertigter Kabel-
baum verfügbar.
Der Kabelbaum ist interface-seitig mit Molexsteckern anschlussfertig vorkonfektioniert.
Roboter-seitig muss der Kabelbaum an die Anschlusstechnik der Roboter-Steuerung
angepasst werden.
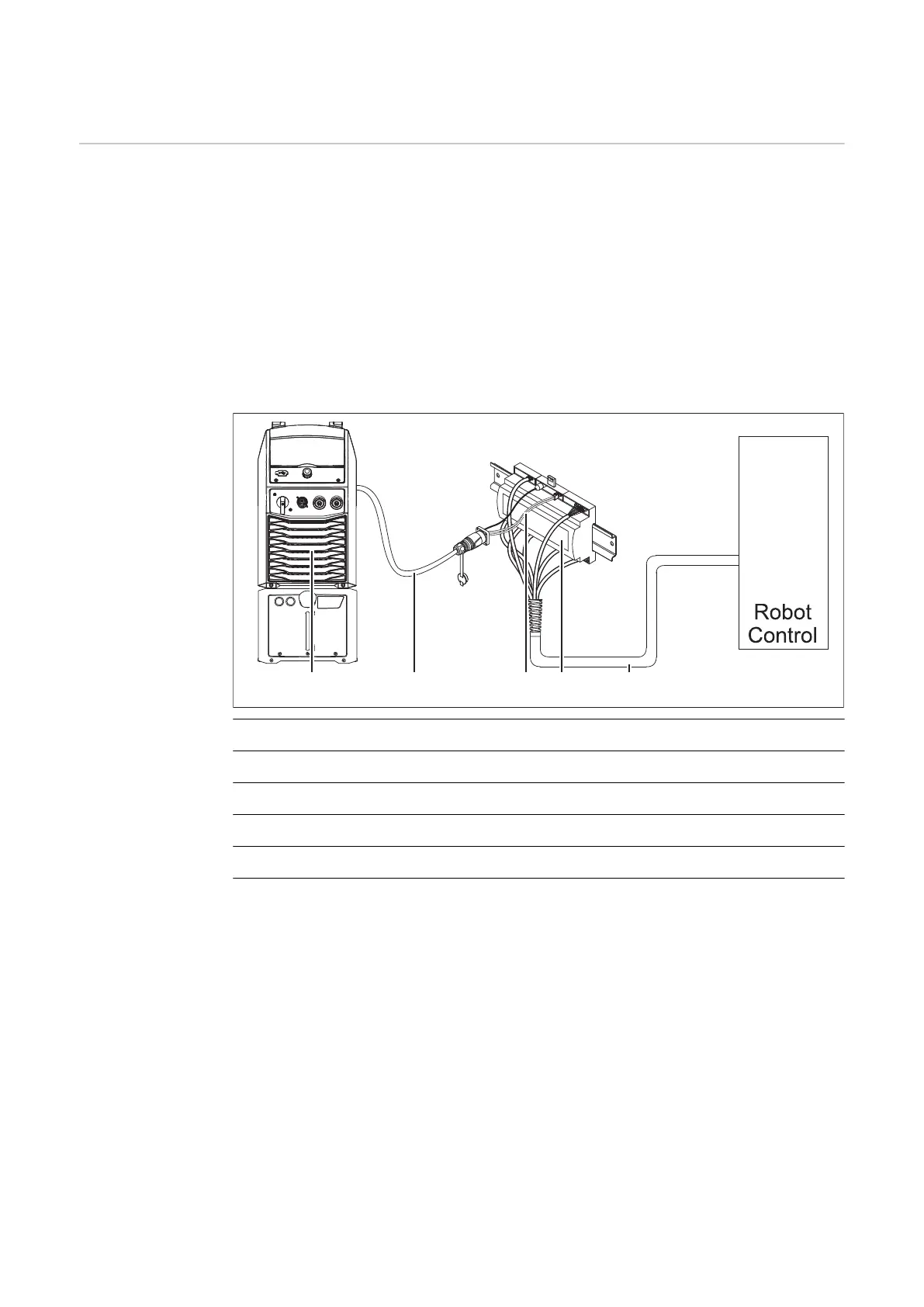
(1) Stromquelle mit optionalem Anschluss SpeedNet an der Geräterückseite
(2) SpeedNet-Verbindungskabel
(3) Kabelbaum zur Verbindung mit der Stromquelle
(4) Interface
(5) Kabelbaum zur Verbindung mit der Roboter-Steuerung
4
 Loading...
Loading...




