9-25
(6) Data format 5
16-bit binary code, least increment 0.01, positive/negative value
The negative data is expressed in 2's complement. -1 -> FFFF (hex.)
Example: In the case that M07: (actual torque) = -85.38%
-85.38 x 100 = -8538 (dec.) = DEA6 (hex.), hence: DEA6 ⇒
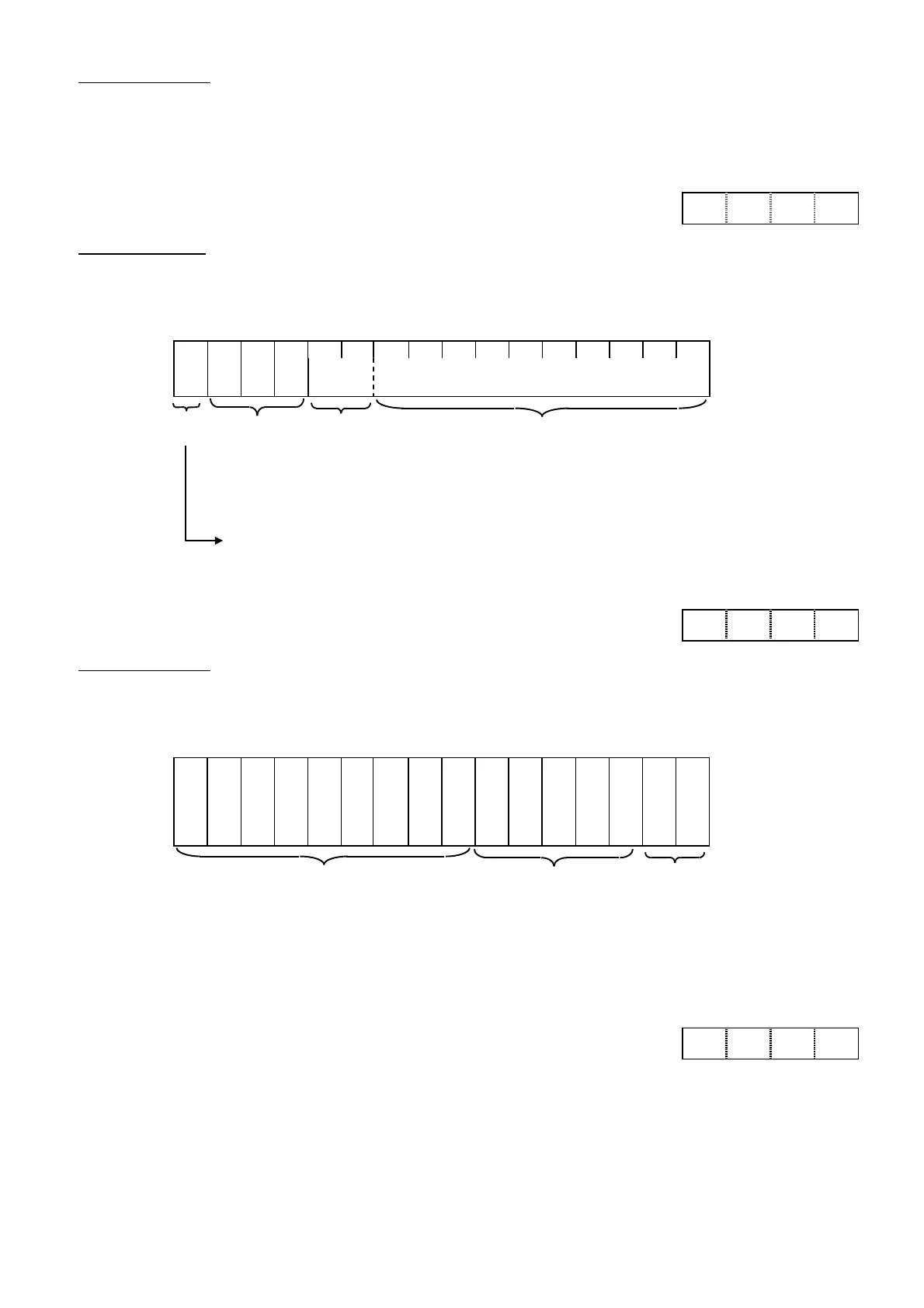
(7) Data format 6
Acceleration/deceleration time, amperage data
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
0
0
0
0
Index
Data field
0 : 0.01 × 001~999 (0.01~9.99)
1 : 0.1 × 100~999 (10.0~99.9)
2 : 1 × 100~999 (100~999)
3 : 10 × 100~360 (1000~3600)
0: Positive (+), 1: Negative (-)
Example: In the case that F07: communication No. (acceleration time 1) = 20.0 seconds
20.0 = 0.1 x 200, hence: 04C8 ⇒
(8) Data format 8
Operation command
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
RESET
0
0
0
0
0
0
0
0
X5
X4
X3
X2
X1
REV
FWD
General-purpose input FWD: forward rotation command,
REV: reverse rotation command
(All bits: "1" when turned on)
Example: In the case that M13: (operation command) = 0000 0000 0100 0101 (bin.): FWD, X1, X5 =
ON
M13 = 0045 (hex.), hence: 0045 ⇒
D E A 6
0 4 C 8
0 0 4 5
Polarity
Unused
Unused

 Loading...
Loading...



