33700 SMART-BOX - Graupner HoTT 2.4 10
3.2.4 Mixer Setup (RX FREE MIXER / RX WING MIXER)
To switch to the Mixer setup display, press the ENTER button repeatedly until RX FREE MIXER appears
on the screen.
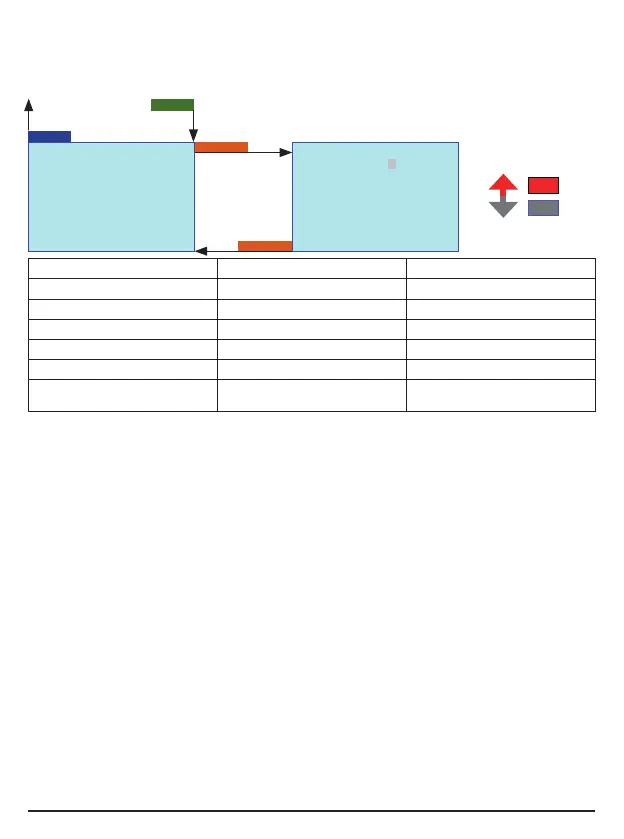
Display Description Setup
MODE Mode 1, 2, 3
MASTER CH Master channel 0, 1 – 8
SLAVE CH Slave channel 0, 1 – 8
SLAVE TRAVEL- Limit Servo travel, negative 0 – 150%
SLAVE TRAVEL+ Limit Servo travel, positive 0 – 150%
RX WING MIXER
TAIL TYPE
Tail type Normal, V-Tail, Elevon
RX FREE MIXER
Mode (MODE): a total of up to three mixers can be used simultaneously, and the MODE function is used to
switch between mixer 1, mixer 2 and mixer 3 for the purpose of adjustment. The remainder of the settings in
this display only affect the mixer selected at this point.
Master channel (MASTER CH): here you set the main channel (primary control function); the slave channel
is mixed into the channel you select at this point.
Sub-channel (SLAVE CH): subsidiary channel coupled to the main channel; the sub-channel is mixed into
the main channel to the extent defi ned by the value you set.
Sub-channel servo travel (SLAVE TRAVEL +/-): this point is used to adjust the maximum control surface
travel of the servo connected to the sub-channel; the adjustment is carried out separately for both directions
(EPA).
RX WING MIXER
Tail type (TAIL TYPE): at this point you can select pre-set mixer functions for the appropriate model type
NORMAL: conventional model aircraft - separate rudder and elevator at the tail - no mixer functions acti-
vated
V-TAIL: For this model type the control functions elevator and rudder are linked together in such a way that
each of the two control surfaces - actuated by a separate servos - carries out superimposed elevator and
rudder functions.
The servos are usually connected to the receiver as follows: OUTPUT CH 3: left V-tail servo, OUTPUT CH
4: right V-tail servo
ELEVON (delta / fl ying wing models): The servos connected to outputs 2 and 3 assume superimposed
aileron and elevator functions. The servos are usually connected to the receiver as follows: OUTPUT CH 2:
left elevon, OUTPUT CH 3: right elevon
BOX will be lost, including the channel assignment (INPUT CH).
RX FREE MIXER < >
MODE : 1
MASTER CH : 08
SLAVE CH : 08
S-TRAVEL- : 100
S-TRAVEL+ : 100
RX WING MIXER
TAIL TYPE : NORMAL
INC + DEC
INC
DEC
ENTER
ESC
RX FREE MIXER < >
MODE : 1
MASTER CH : 08
SLAVE CH : 08
S-TRAVEL- : 100
S-TRAVEL+ : 100
RX WING MIXER
TAIL TYPE : NORMAL
INC + DEC