Essential notes before use
Essential notes before use
A. Checking Motor ID certainly.
: Enter the motor ID indicated on the motor name plate to the parameter of “P01-01”.
For details on the motor ID, refer to Chapter 3 of this manual.
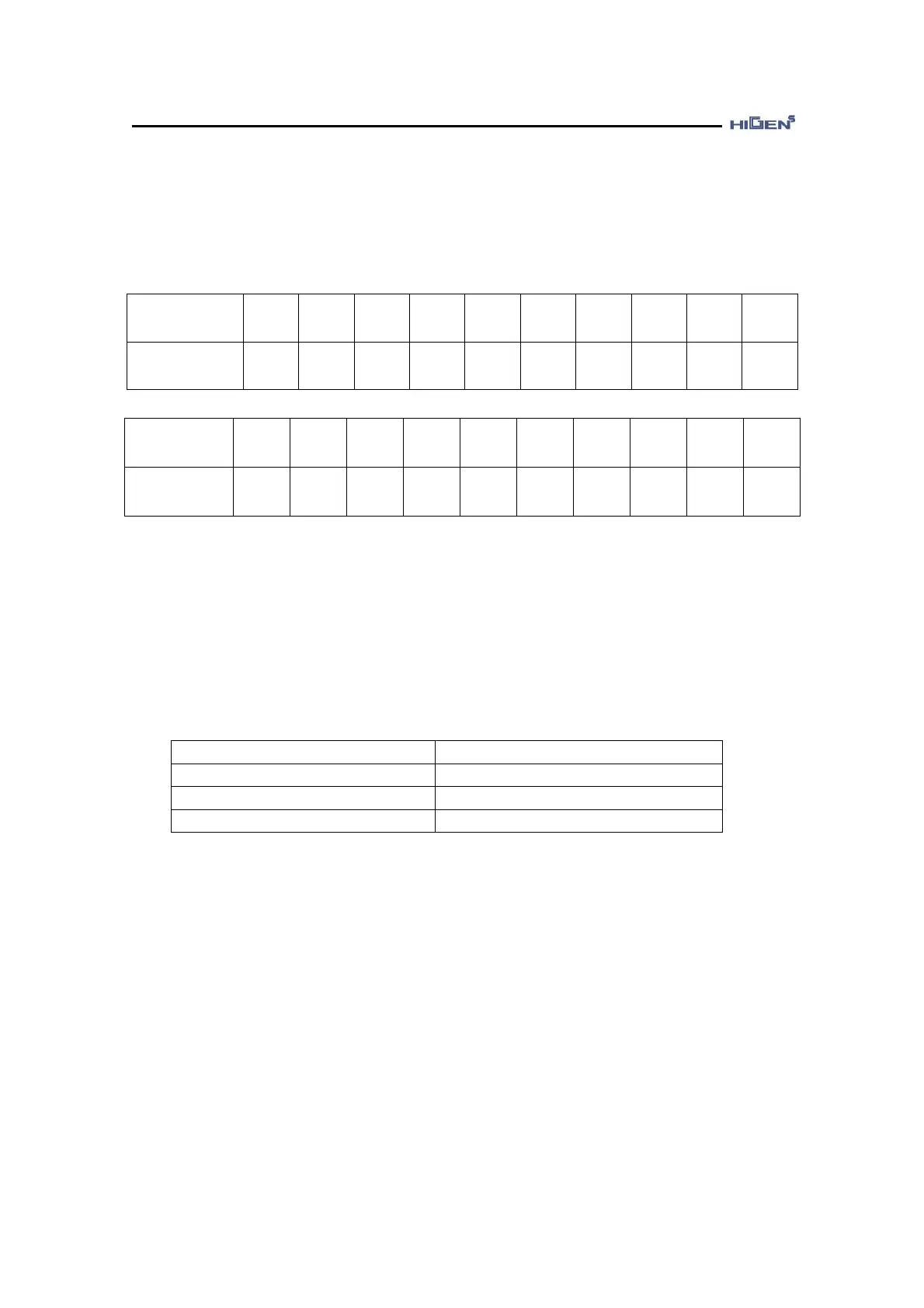
B. Checking Drive AMP-Type certainly.
AMP-Type
[ FDA70- ]
01 02
04/
04B
05 08 10
15/
15B
20/
20B
30/
30B
45
P01-11
[Drive ID]
1 2 4 5 8 10 15 20 30 45
C. Checking Encoder ID certainly.
Encoder
Type
Manual
setting
INC
2000
INC
2500
INC
3000
INC
5000
INC
6000
INC
2048
ABS
11/
13bit
INC
17/
33bit
ABS
17/
33bit
P01-12
[Encoder ID]
Enc-0 Enc-A Enc-b Enc-C Enc-d Enc-E Enc-F Enc-G Enc-P Enc-R
♥ When you set the encoder ID to “Enc-0”, you can change the value of P01-13 (Encoder
pulse rate). But if you set the encoder ID to “Enc-A ~ Enc-R”, you cannot change the value of
P01-13.
D. Operate servo system after autotuning is off. (P02-17)
: Always cancel the autotuning during normal operation after gain setting using autotuning.
E. Motor handling
: Avoid impacting to the encoder in connecting coupling to the Motor shaft or operating.
F. Recommended specification of Encoder wiring.
Encoder type Page of wiring explanation
Incremental encoder 2-13
Absolute encoder 11bit 2-14
Absolute/Incremental encoder 17bit 2-15
G . Separate GND24 (CN1-24, 25) and GND (CN1-1, 8, 26, 33, 34, 36).
: When connect commonness, malfunction of servo drive and burnout can occur.
H . Treatment of the servo motor attached holding brake .
: The brake built in the servo motor is a normal closed type brake. Which is used only to hold
and can not be used for braking. Use the holding brake only to hold a stopped servo motor.
I. Do not supply AC at N, P connector when connect the power line to Small and
Medium capacity servo drive.
: If main power is DC power, because N connector (-) voltage and P connector (+) voltage,
burnout of servo drive when N, P connector is supplied AC power.
Choose positively necessary AC and DC power, and use.