[3] Positioning under ASR mode (Orientation function) (V2 mode)
This can be implemented using SJ-FB ( feed back option card ).
(3-1) Orientation Function
The SJ300 series incorporates a function where the inverter counts the pulses from the motor encoder
and stops after a certain number of pulses. It is called the orientation function.
The Orientation function is used when an accurate stop position is required.
The SJ300 does not count encoder pulses every time, which means it is different from servo drives. The SJ300
starts counting the encoder pulses only after the Z pulse is given during orientation mode. Therefore the
SJ300 can stop the motor at a certain position.
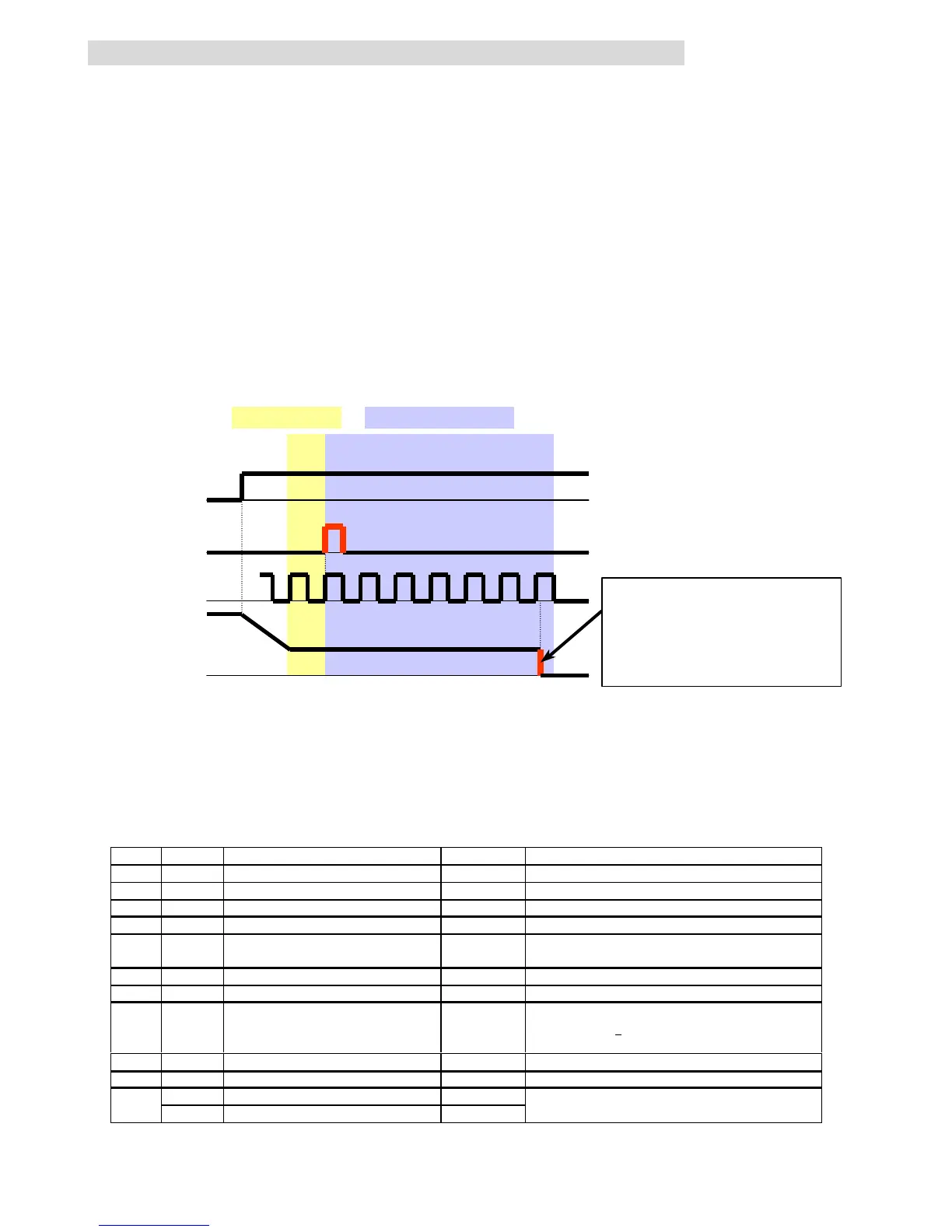
s First, it is necessary to go into the orientation mode. (Turn the “ORT ” terminal ON on the logic
card.) During orientation period, INV stops the motor after certain pulses from Z pulse is given.
<Example of stopping 7pulses after Z pulse is given>
s Orientation mode starts
when the actual output
frequency reaches
the orientation speed.
s Deceleration to the
orientation speed is based on
the set deceleration time.
Parameter set for this example under following condition is in table below.
- 1024 ppr encoder
- 2.0 Hz of orientation speed
- acceptable positioning range is 7±3 pulses
- give frequency command from the analog input (O-L)
- give RUN command from the digital panel
No. Code Contents Set value Remarks
1 A044 Control method 05 V2 (closed loop control)
2 P011 ppr of the encoder 1024 Depends on the encoder
3 P012 Control mode 00 ASR (Speed command base on speed)
4 P013 Mode of the pulse train input - No need to care because this is ASR mode
5 P014 Stop position while orientation 28 [P014] = 4096 * 7 / 1024 = 28
6 P015 Speed while orientation 2.0 In case of 2.0Hz for orientation speed.
7 P016 Direction of orientation 00 In case of FW rotation
8 P017 Orientation completion range 12 Allowable deviation of positioning.
[P017] = 3 * 4
(Multiplying 4 is fixed as MCU calculation)
9 A001 Frequency command from; 01 Terminal (O-L input)
10 A002 RUN command from; 02 “RUN” key of the operator
F002 Acceleration time 3.011
F003 Deceleration time 3.0
As short as the system allows.
Z pulse
A pulse
fout
 Loading...
Loading...







