19
g
g
50°
sx dx
g
g
4 g
sx dx
g
g
sx dx
g
g
3 g
sx dx
g
g
6 g
sx dx
1 g
ENGLISH
Use and maintenance manual
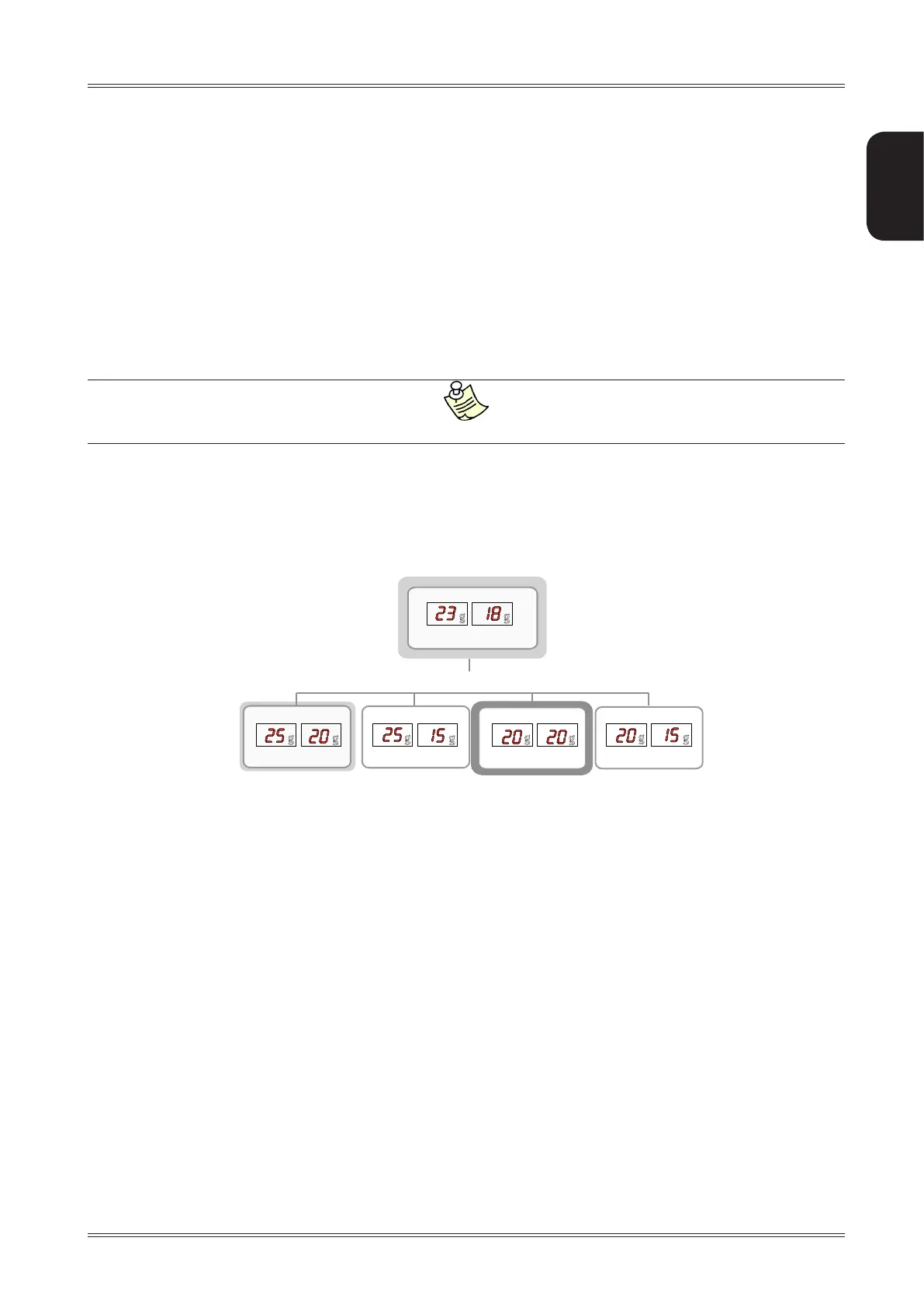
Initial unbalance
Phase shift
Possible approximations
static residue
static residue
static residue
static residue
With traditional wheel
balancer
Choice with minimum
static unbalance
6.6 SPOTTER
The spotter device emits a laser reference to help you select the correction planes and indicates the correct po-
sition during correction.
▪ Inside plane measurement, configuration on-1/on-2
> ON-1: the spotter emits a laser reference point only after having acquired the dimensions relating to
the weight to be applied on the inside of the wheel.
> ON-2: the spotter emits a laser reference point as soon as the automatic gauge is pulled out.
▪ Outside plane measurement
After acquiring the inside dimension, move the distance and diameter gauge at least 40 mm towards the inside
of the rim. At this point, the laser reference starts moving together with the automatic distance and diameter
gauge to help the user select the position where to apply the adhesive weight on the outside.
When the dimensions have been acquired, the laser reference point emitted by the spotter flashes fast.
▪ Weight application
The adhesive weights must always be applied starting from the laser indication towards the inside of the rim.
In order to obtain a correct laser reference point, the tip of the automatic gauge must always remain in contact with the rim.
6.7 AUTOMATIC MINIMIZATION OF STATIC UNBALANCE
This program is designed to improve the quality of balancing without any mental effort or loss of time by the opera-
tor. In fact by using the normal commercially available weights, with pitch of 5 in every 5 g, and by applying the
two counterweights which a conventional wheel balancer rounds to the nearest value, there could be a residual
static unbalance of up to 4 g. The damage of such approximation is emphasized by the fact that static unbalance is
cause of most of disturbances on the vehicle. This new function, resident in the machine, automatically indicates
the optimum entity of the weights to be applied by approximating them in an “intelligent” way according to their
position in order to minimize residual static unbalance.
Use of the wheel balancer
 Loading...
Loading...