www.ichibot.id USER GUIDE Page 18
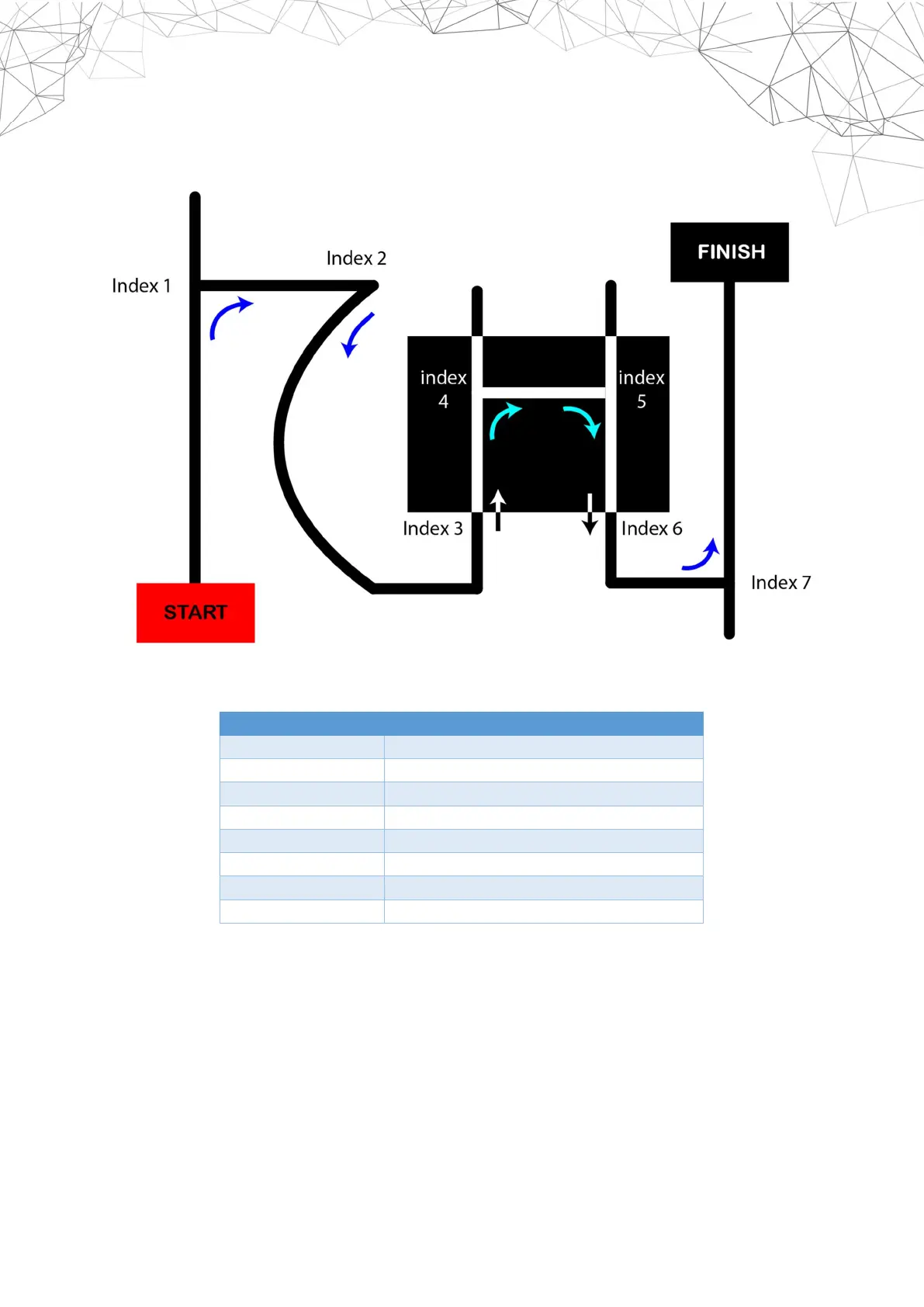
The second case example can be seen in the picture below:
Description of Index in the picture above:
NUMBER INDEX ROBOT ACTION
INDEX 0 START POSITION – BLACK LINE
INDEX 1 TURN RIGHT – BLACK LINE
INDEX 2 TURN RIGHT – BLACK LINE
INDEX 3 FORWARD – WHITE LINE
INDEX 4 TURN RIGHT – WHITE LINE
INDEX 5 TURN RIGHT – WHITE LINE
INDEX 6 FORWARD – BLACK LINE
INDEX 7 TURN LEFT – BLACK LINE
In concept, Ichibot can turn automatically without index on a track with an angle of more than
90
o
from the direction of the arrival of the robot.
The robot will follow the line & walk straight when the center sensor still detects the
line.
When the center sensor does not detect the line, the robot will try to move towards
the center sensor.
When the robot loses the line and the last one hit the line is the middle sensor part,
the robot will still move straight.
Index 0