Maintenance and
Troubleshooting
MD380 User Manual
- 288 -
Before contacting Inovance for technical support, you can first determine the fault type,
analyze the causes, and perform troubleshooting according to the following tables. If the
fault cannot be rectied, contact the agent or Inovance.
Err22 is the AC drive hardware overcurrent or overvoltage signal. In most situations,
hardware overvoltage fault causes Err22.
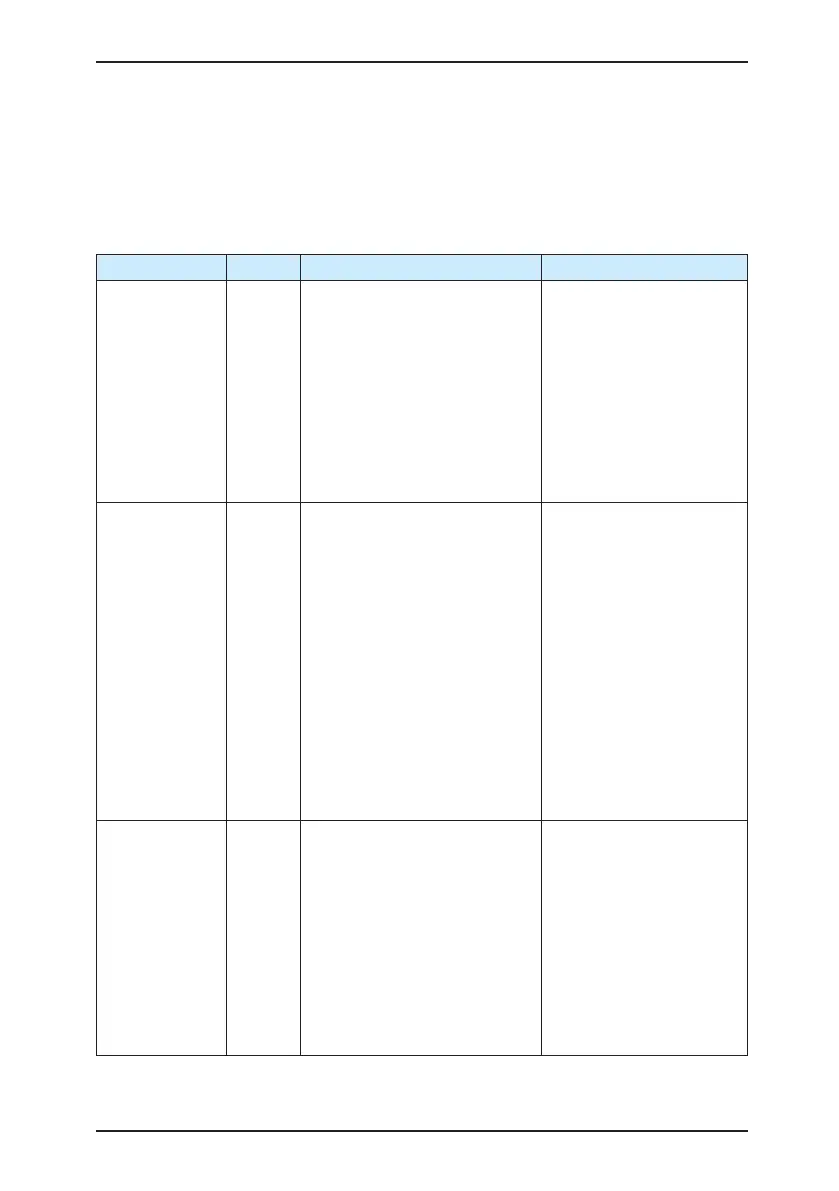
Figure 9-1 Solutions to the faults of the MD380
Fault Name Display Possible Causes Solutions
AC drive unit
protection
Err01
1: The output circuit is grounded
or short circuited.
2: The connecting cable of the
motor is too long.
3: The IGBT overheats.
4: The internal connections
become loose.
5:The main control board is faulty.
6: The drive board is faulty.
7: The AC drive IGBT is faulty.
1: Eliminate external faults.
2: Install a reactor or an
output lter.
3: Check the air lter and the
cooling fan.
4: Connect all cables
properly.
5: Contact the agent or
Inovance.
Overcurrent
during
acceleration
Err02
1: The output circuit is grounded
or short circuited.
2: Motor auto-tuning is not
performed.
3: The acceleration time is too
short.
4: Manual torque boost or V/F
curve is not appropriate.
5: The voltage is too low.
6: The startup operation is
performed on the rotating motor.
7: A sudden load is added during
acceleration.
8: The AC drive model is of too
small power class.
1: Eliminate external faults.
2: Perform the motor auto-
tuning.
3: Increase the acceleration
time.
4: Adjust the manual torque
boost or V/F curve.
5: Adjust the voltage to
normal range.
6: Select rotational speed
tracking restart or start the
motor after it stops.
7: Remove the added load.
8: Select an AC drive of
higher power class.
Overcurrent
during
deceleration
Err03
1: The output circuit is grounded
or short circuited.
2: Motor auto-tuning is not
performed.
3: The deceleration time is too
short.
4: The voltage is too low.
5: A sudden load is added during
deceleration.
6: The braking unit and braking
resistor are not installed.
1: Eliminate external faults.
2: Perform the motor auto-
tuning.
3: Increase the deceleration
time.
4: Adjust the voltage to
normal range.
5: Remove the added load.
6: Install the braking unit and
braking resistor.

 Loading...
Loading...
