Description of Warning Codes
‑24‑
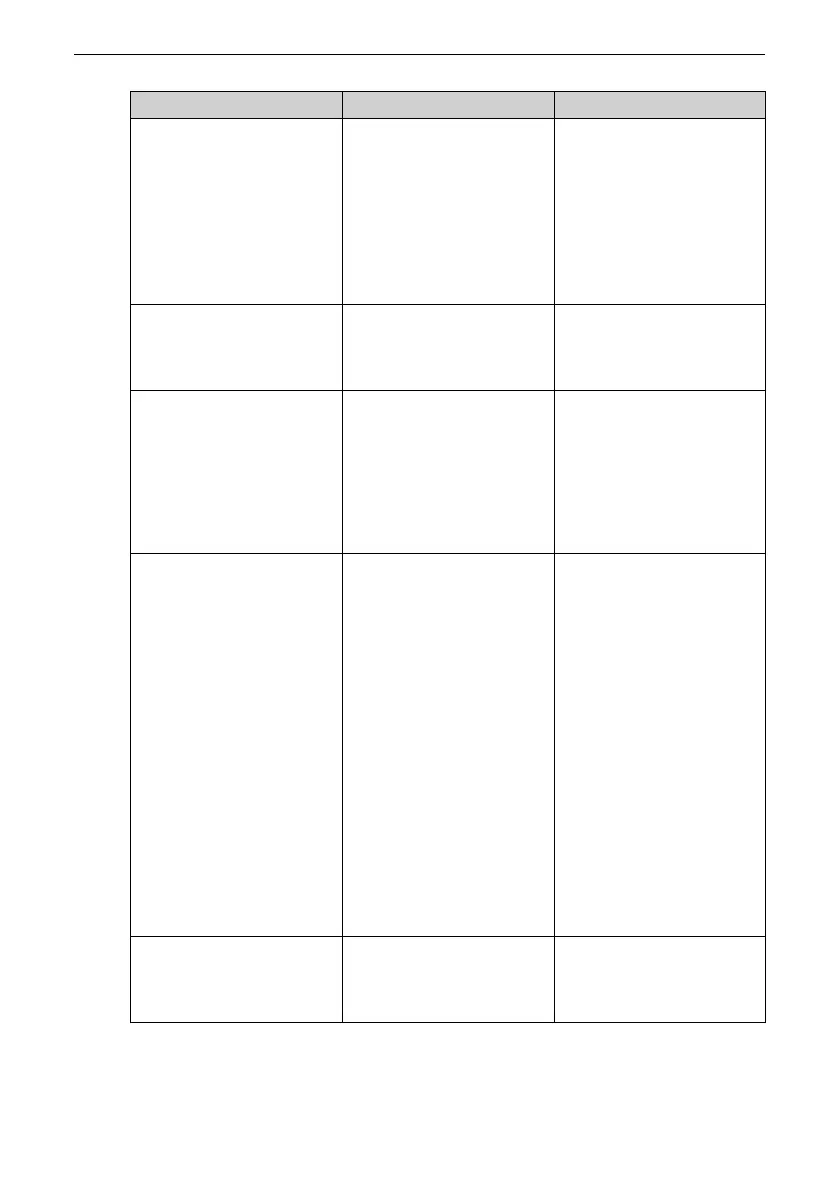
Cause
Confirming Method
Solution
3. Acceleration/Deceleration
is too frequent or the load
inertia is too large.
Check the mechanical
inertia ratio or perform
inertia auto‑tuning. View the
value of H08.15 (load
moment of inertia ratio).
Confirm the individual
operation cycle when the
servo motor operates
cyclically.
Increase the acceleration/
deceleration time.
4. The gain values are
improper or the stiffness
level is too high.
Check whether the motor
vibrates and generates
unusual noise during
operation.
Adjust the gains again.
5. The servo drive model or
motor model is set
improperly.
View the model of the motor
equipped with a serial‑type
encoder in H00.05 and the
servo drive model in H01.10.
Read the servo drive
nameplate and set the Servo
servo drive model (H01.10)
and motor model properly
according to section "Servo
Drive Model and Nameplate"
in SV670P Series Servo Drive
Selection Guide.
6. The motor is stalled due
to mechanical factors,
resulting in overload during
operation.
Check the reference and the
motor speed (H0b.00)
through the software tool or
the keypad.
● References in the position
control mode: H0b.13
(Input position reference
counter)
● References in the speed
control mode: H0b.01
(Speed reference)
● References in the torque
control mode: H0b.02
(Internal torque reference)
Check whether the reference
value is not 0 or is very large
but the motor speed is 0
RPM in the corresponding
mode.
Eliminate the mechanical
factors.
7. The servo drive is faulty.
Power off and on the servo
drive again.
Replace the servo drive if the
fault persists after the servo
drive is powered off and on
again.
● E910.0: Control circuit overvoltage

 Loading...
Loading...







